极坐标、参数方程与向量入口
前面几章主要用直角坐标描述函数:给一个 ,算出一个 ,再把点画在平面上。这种语言很适合直线、抛物线、多项式和很多代数函数。
但平面里的对象不总是愿意按“横坐标到纵坐标”的方式出现。一个雷达屏幕上的目标,更自然的信息是“离中心多远、朝哪个方向”。一个运动中的点,更自然的信息是“第 秒在哪里”。一段位移或速度,更自然的信息是“大小是多少、方向朝哪里”。
本章整理三种新语言:极坐标、参数方程和向量。它们不是为了取代直角坐标,而是让同一个几何对象、运动对象或变化对象有更多描述方式。
换一种坐标语言
直角坐标把平面上的点写成 。这里的两个数字分别回答:
- 从原点向右或向左走多少?
- 再向上或向下走多少?
极坐标把同一个点写成 。这里的两个量回答:
- 从原点出发走多远?
- 朝哪个角度走?
参数方程把点的位置写成随参数变化的两个函数:
这里的重点不是先问 是不是 的函数,而是问:当 改变时,点在哪里、沿什么方向走、走得快不快。
向量则把“从一个位置到另一个位置”的变化看成一个整体。向量有长度,也有方向。它可以表示位移、力、速度,也可以表示平面中的一步移动。
本章的核心不是背三套符号,而是练习换语言。同一个圆、同一条路径、同一次移动,可以在直角坐标、极坐标、参数方程和向量之间来回翻译。翻译时要保留对象本身,也要留意每种语言额外带来的信息。
极坐标从哪里来
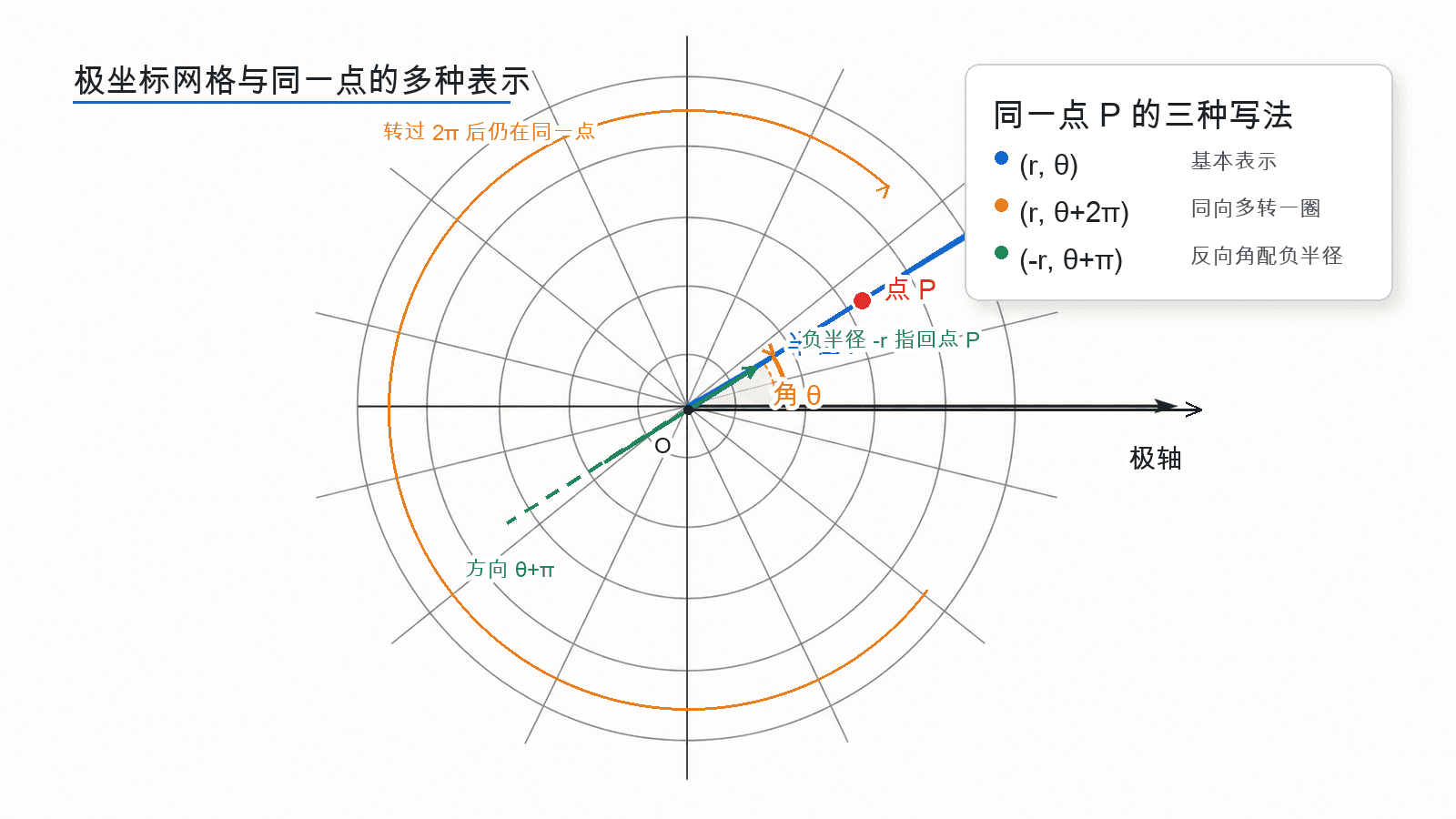
极坐标平面先选定一个原点,叫极点;再从极点向右画一条参考射线,叫极轴。一个点 的极坐标 表示:从极点出发,沿着与极轴成角 的方向走距离 。
通常把 理解为距离,所以 。但在极坐标中也允许 。如果 是负数,意思是先找到角 指向的射线,再朝相反方向走 。
这会带来一个和直角坐标很不同的现象:同一个点有多个极坐标表示。例如,只要多转一整圈,点的位置不变:
如果把半径改成负数,同时把角度加上 ,点的位置也不变:
原点更特殊。只要 ,不管角度是多少,点都在原点。
极坐标中的“角度”不是点的第二个坐标轴位置。它描述的是方向。读极坐标时先看方向,再看沿这个方向走多远;不要把 当成“横着走 、竖着走 ”。
下面的实验台可以拖动或输入 与 。重点观察两件事:点的位置怎样随角度旋转;当半径取负时,点为什么会跑到相反方向。
极坐标与直角坐标转换
极坐标和直角坐标之间的转换来自直角三角形。点 到原点的距离是 ,它和正 轴的夹角是 。于是水平分量和竖直分量分别是:
反过来,从 找 和 ,先用勾股定理求距离:
如果 ,角度满足:
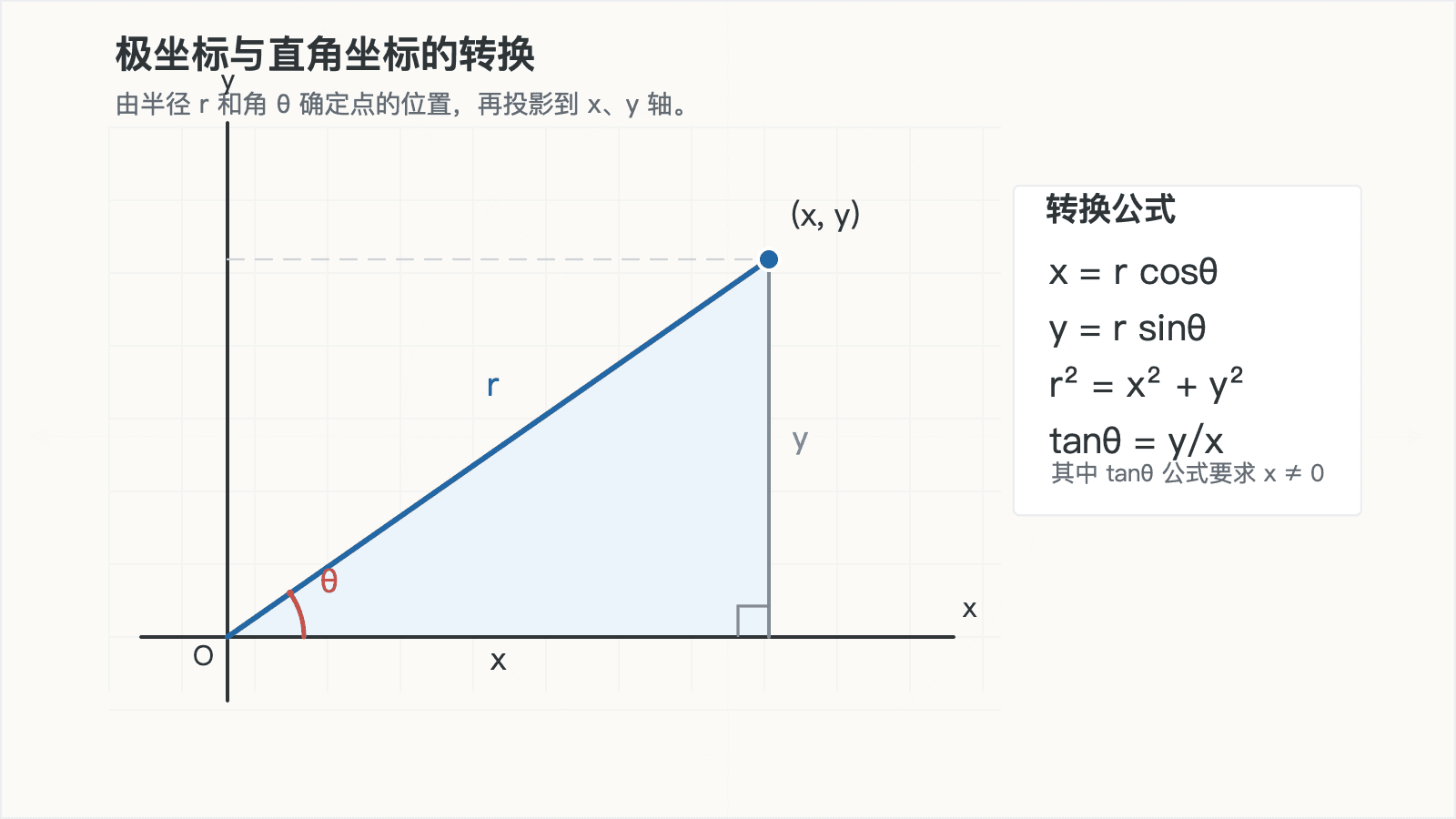
这里最容易出错的是角度所在象限。只看 会丢掉象限信息,因为相差 的两个角正切值相同。实际判断时要把点所在象限一起看进去。
例题:把极坐标转成直角坐标
把点 写成直角坐标。
先写出转换公式。极坐标转直角坐标时使用 和 。
例题:把直角坐标转成极坐标
把点 写成一个极坐标表示。
先求距离。,所以可以取 。
练习:点 的一个极坐标表示是什么?
点到原点的距离是 。这个点在第三象限,参考角是 ,所以可以取 。一个极坐标表示是 。
极坐标图像
在直角坐标中,方程 常常表示:横坐标变化时,纵坐标怎样变化。在极坐标中,方程 表示:方向角变化时,从原点到曲线的距离怎样变化。
这让一些围绕原点旋转、对称或向外展开的曲线变得很自然。比如圆、玫瑰线、心形线和螺线,用 与 的关系写出来,往往比用 与 的关系更直接。
画极坐标图像时,可以按下面的顺序思考:
- 先选一些关键角,例如 。
如果 出现负值,不要直接把点删掉。负半径表示点落在相反方向,这正是很多玫瑰线花瓣出现的原因。
从方程看图像特征
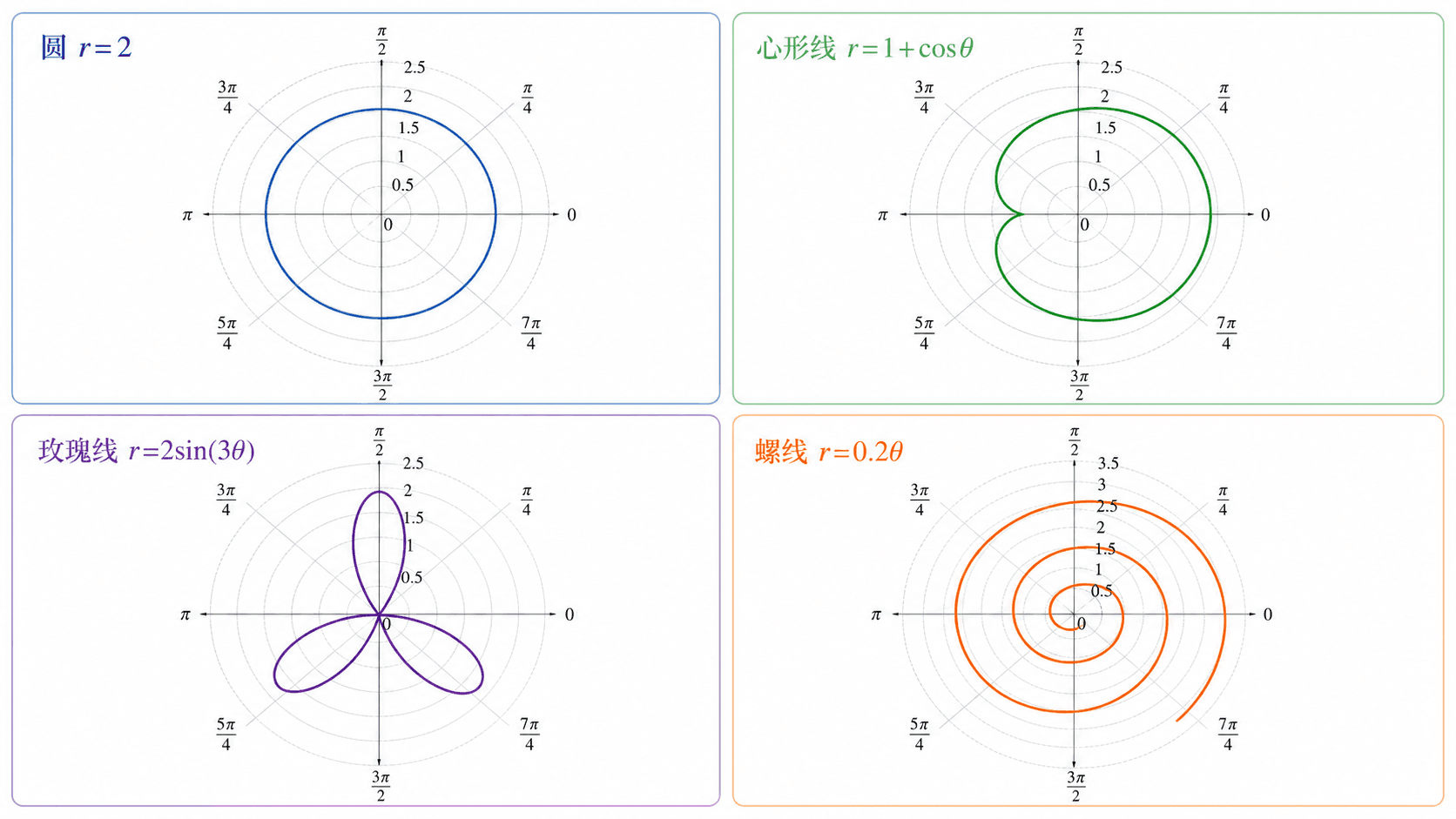
方程 表示所有方向上离原点距离都是 的点,所以它是以原点为圆心、半径为 的圆。
方程 在 时半径最大,在 时半径为 ,图像会在极点处收拢,形成心形线。
方程 中的 让半径在一次旋转中反复增大、减小、变号,于是出现多个花瓣。
方程 表示角度越大,离原点越远。点一边旋转一边离开中心,形成螺线。
判断极坐标图像时,先问“当方向改变时,半径怎样变”。这比一开始就把方程改写成 和 更省力。只有在需要和直角坐标图像比较、求交点或代数化简时,才把它转换过去。
例题:把极坐标方程改写成直角坐标方程
把 改写成直角坐标方程,并判断图像。
先把方程两边同时乘以 ,得到 。这样做是为了出现 和 这两个可转换的表达式。
参数方程描述路径
直角坐标中的 会把 当成输入,把 当成输出。参数方程换了一个问法:让一个参数 同时控制 和 。
参数 常常可以理解为时间,但不一定必须是时间。它可以表示角度、进度、机器运行阶段,或者任何能按顺序变化的量。
例如:
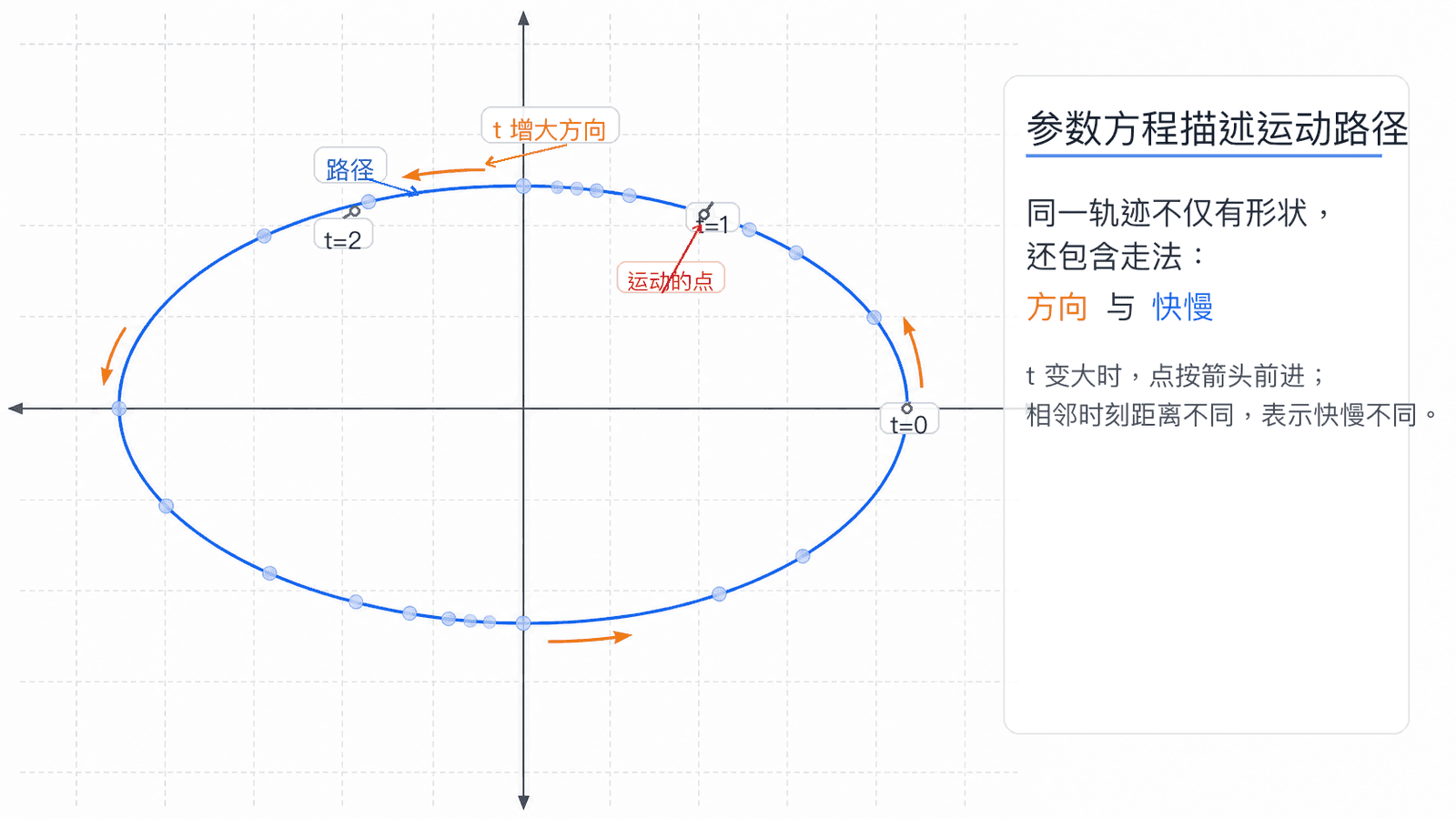
当 变化时,点沿椭圆运动。消去参数可以得到:
这个直角坐标方程告诉我们轨迹形状是椭圆。但参数方程还告诉我们点从哪里开始、往哪个方向走,以及 改变相同幅度时点在不同位置移动的情况。
消去参数以后,常常会丢掉参数范围、运动方向和速度信息。两个参数方程可能画出同一条几何曲线,却用不同方向或不同快慢走过它。做题时不能只看消参后的方程。
例题:消参以后还要检查什么
考虑参数方程:
由 可得 。把它代入 ,得到 。
参数方程为什么适合运动
抛物运动可以用参数方程描述:
这里 是时间, 是初速度大小, 是发射角, 是初始高度, 是重力加速度。这个模型不要求先把 写成 的函数。它直接记录“第 秒横向在哪里、竖向在哪里”,所以更贴近运动过程。
练习:参数方程 画出的轨迹是什么?当 时点在哪里?
消去参数可得 ,所以轨迹是以原点为圆心、半径为 的圆。当 时,,,点在 。随着 增大,点从右端开始逆时针运动。
向量入口
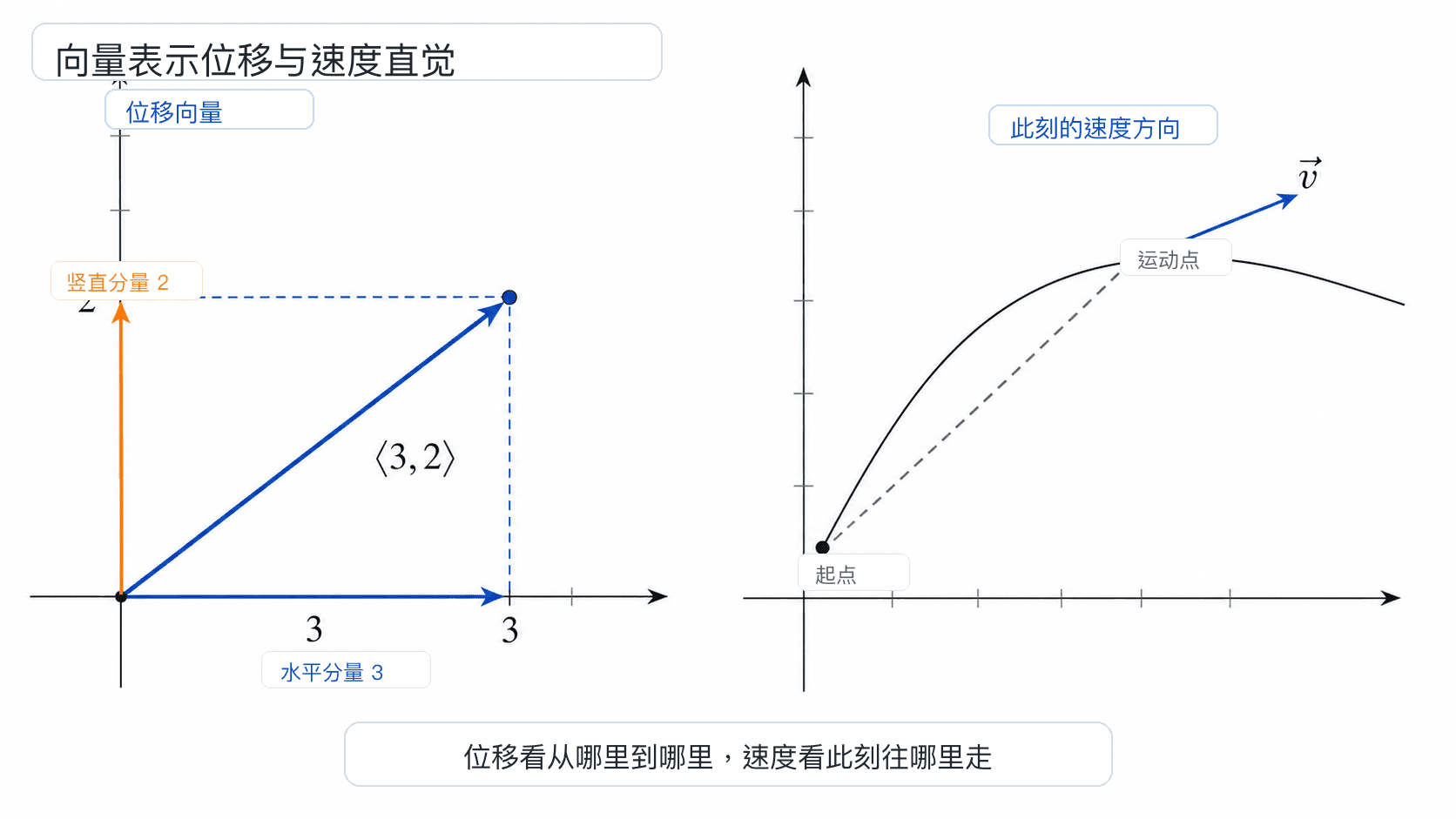
向量描述的是有大小、有方向的量。平面中的向量可以写成分量形式:
这表示从起点出发,水平方向移动 ,竖直方向移动 。如果只关心位移,起点放在哪里并不改变这个向量;只要水平分量和竖直分量相同,向量就相同。
向量的长度来自勾股定理:
如果向量与正 轴的夹角是 ,那么它的方向满足:
和极坐标一样,求方向角时也要看象限。向量 不应该只因为 就选 ;它实际指向第二象限。
位移向量和位置向量
点 到点 的位移向量是:
它回答的是“从 到 需要移动多少”。如果把起点放在原点,终点放在 ,向量 也可以看作点 的位置向量。
速度的直觉
如果一个点沿参数曲线运动,那么某一时刻的速度不是“点在哪里”,而是“此刻正朝哪里走、走得多快”。在图像上,速度向量通常沿着曲线的切线方向。
本章还不需要正式计算导数。你只需要先建立直觉:位置由参数方程给出,位移比较两个位置,速度描述位置随时间改变的瞬时趋势。
练习:点 到点 的位移向量、长度分别是什么?
位移向量是 。长度是 。
三种语言看同一个对象
下面这张表把本章的三种新语言放在一起比较。它们都描述平面对象,但关注点不同。
同一个圆可以写成直角坐标方程:
也可以写成极坐标方程:
还可以写成参数方程:
如果点沿这个圆运动,那么它在某一小段时间里的位移可以用向量描述。四种语言没有谁更“高级”,关键是看当前问题问什么。
常见误区
把极坐标当成直角坐标
不是“向右走 ,向上走 ”。它表示沿 方向走 个单位。
忘记极坐标表示不唯一
如果题目问“一个极坐标表示”,给出一个正确答案即可。如果题目问“所有表示”,就要考虑加上 ,以及负半径的写法。
用反正切时不看象限
从直角坐标转极坐标, 只提供斜率关系。角度还要和点所在象限一致。
消参后忘记参数范围
参数方程 消参得到 ,但如果 被限制在某个区间内,图像也会被限制。方向也要按 增大的顺序标出。
把向量和终点混为一谈
向量 可以从原点画到 ,也可以从 画到 。只要水平变化和竖直变化相同,它们表示同一个位移向量。
综合练习
练习一:把极坐标点 转成直角坐标。
使用 和 。因为 ,,所以 ,。直角坐标是 。
练习二:方程 表示什么图像?提示:两边同乘 。
两边同乘 得 。用 、,得到 。配方为 ,所以它是圆心在 、半径为 的圆。
练习三:参数方程 表示什么样的路径?当 增大时点朝哪个方向走?
由 得 ,代入 得 ,所以轨迹是一条直线。当 增大时, 和 都增大,点沿着这条直线向右上方运动。
练习四:两个向量长度都为 ,它们一定相等吗?
不一定。向量相等需要大小和方向都相同。长度相同只能说明大小相同,方向可能不同。例如 和 长度都是 ,但方向不同,所以不是同一个向量。
通向微积分
微积分会继续使用本章的三种语言。
参数方程会出现在运动问题中。位置由 和 给出,速度会描述位置随时间的瞬时变化,加速度会描述速度怎样变化。以后你会看到,参数曲线的切线斜率也可以从 与 的变化关系中得到。
极坐标会出现在曲线、面积和周期问题中。有些图像在直角坐标里方程很长,在极坐标里却只有一句 。以后计算极坐标区域面积时,半径随角度变化的直觉会非常重要。
向量会进入速度、加速度、力和多变量函数。它把“变化”从一个数扩展成有方向的量。学习导数时,速度可以是一维数值;学习平面运动时,速度更自然地成为向量。
本章到这里要留下的不是一堆互不相干的新符号,而是一个习惯:看到对象时先问,哪种语言最贴近它的结构。围绕中心旋转,用极坐标;沿路径运动,用参数方程;关心移动和方向,用向量。