常系数齐次方程与振动模型
二阶线性方程从上一章开始出现。本章把注意力放到最常见、也最有物理味道的一类:
ay′′+by′+cy=0,a=0
它叫二阶常系数齐次线性方程。这里的“常系数”表示 a,b,c 不随自变量变化;“齐次”表示右端没有外部输入。你可以把它看成一个系统被轻轻推了一下之后的自由运动:没有人继续施力,系统只按照自身参数回到平衡、远离平衡,或持续振荡。
本章的核心问题很短:特征方程的根怎样决定解的形状。会算根只是第一步,更重要的是看见根背后的图像和模型语言。
根先决定形状
对常系数齐次方程来说,解的图像通常不是凭空猜出来的。指数函数有一个特殊性质:求导只会把它乘上常数。如果 y=ert,那么 y′=rert,。代入方程得到:
ar2ert+brert+ce
把公共因子 ert 提出来:
(ar2+br+c)ert=0
因为 ert 永远不等于 0,所以真正需要满足的是代数方程:
ar2+br+c=0
这个二次方程叫特征方程。它的根不是一个附属计算,而是告诉我们系统里有哪些基本运动方式。
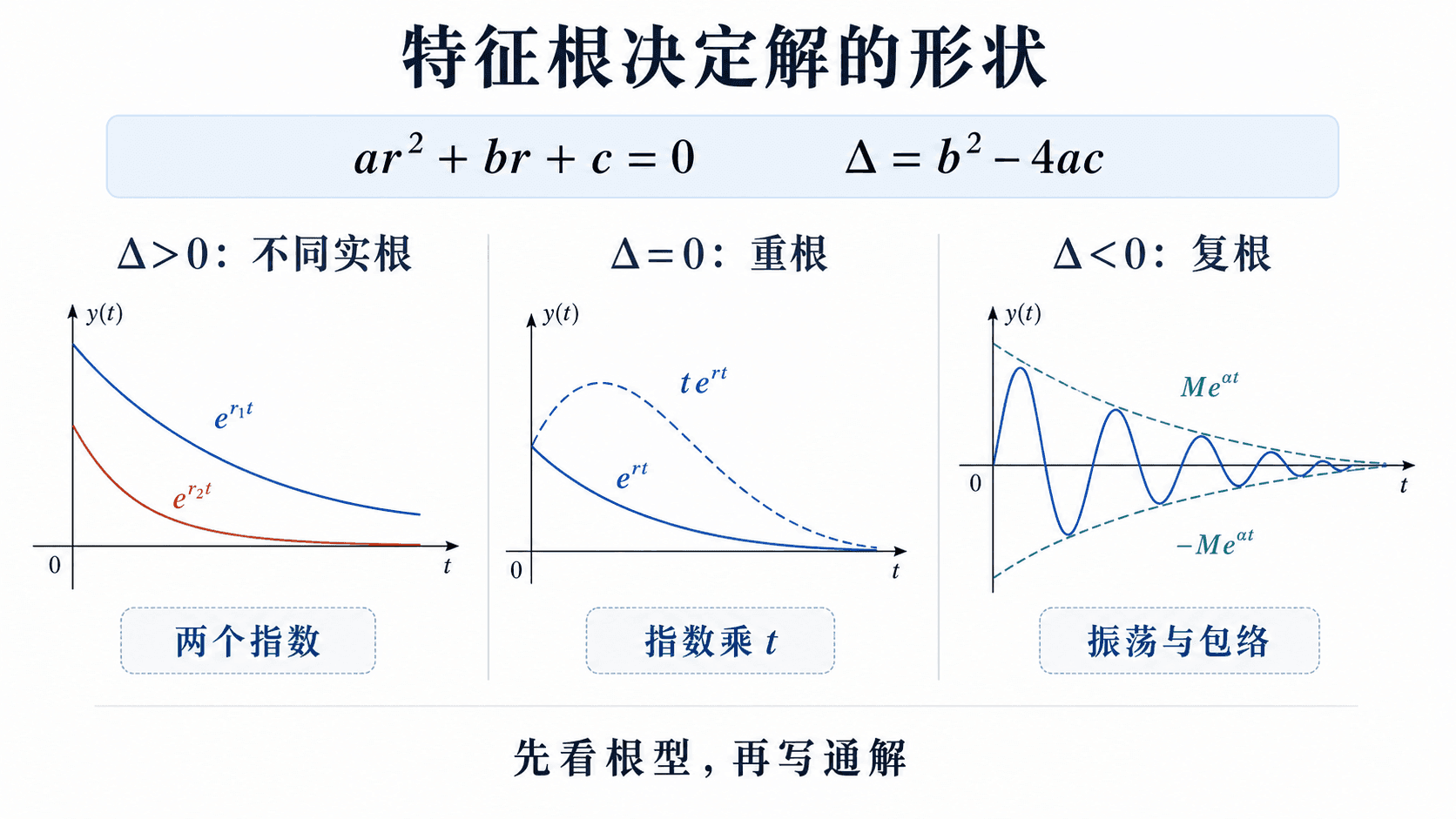 同一个二阶齐次方程,根的类型决定了解的基本形状:指数、指数乘时间,或指数包络下的振荡。
同一个二阶齐次方程,根的类型决定了解的基本形状:指数、指数乘时间,或指数包络下的振荡。
特征方程的作用是把“求函数”暂时变成“求常数”。这一步能成立,不是因为所有函数都是指数,而是因为常系数线性算子作用在指数函数上时,只会产生一个代数倍数。
常系数二阶方程的三种典型情形由判别式控制:
Δ=b2−4ac
当 Δ>0,有两个不同实根;当 Δ=0,有一个重根;当 Δ<0,有一对共轭复根。下面三节分别处理它们。
两个不同实根
若特征方程有两个不同实根 r1 和 r2,那么 er 与 都是方程的解。线性齐次方程允许叠加,所以通解是:
y(t)=C1er1t+C
这条公式真正说的是:系统中有两种独立的指数运动,初始位置和初始速度决定这两种运动各占多少。
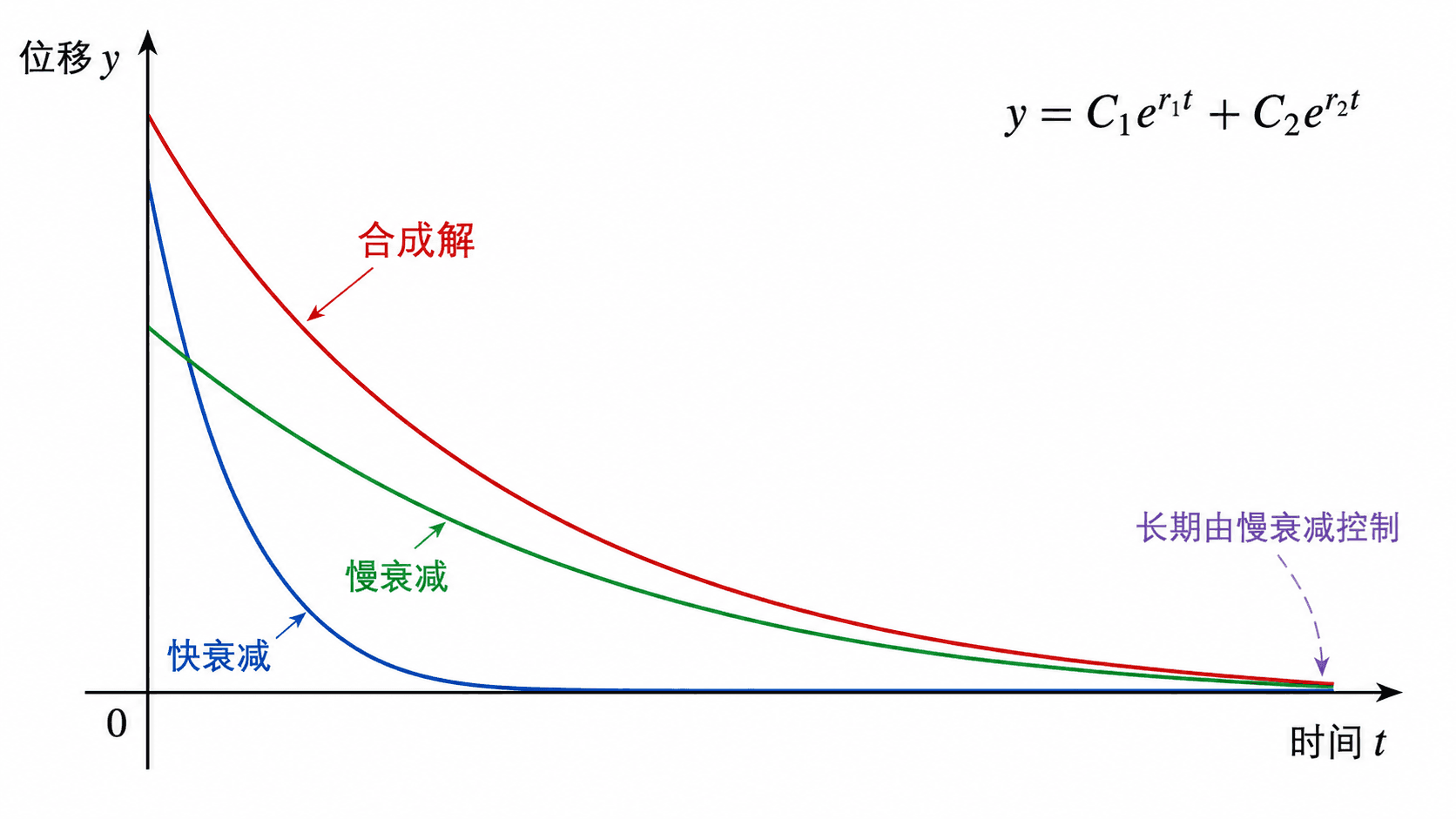 两个实根给出两个指数分量。若两个根都为负,长期形状通常由衰减较慢的那一项控制。
两个实根给出两个指数分量。若两个根都为负,长期形状通常由衰减较慢的那一项控制。
考虑初值问题:
y′′+5y′+6y=0,y(0)
先写特征方程:
r2+5r+6=0分解得到 r=。两个根不同,所以通解写成两个指数项的线性组合。
这个例子不只是一次代数练习。它说明初值条件不是另起炉灶,而是在两个基本解之间分配权重。
判断长期行为时,不要只看“根的绝对值最大”。对负实根来说,绝对值大的根衰减更快;长期留下来的往往是离 0 更近的负根。例如 e−2t 比 e−8t 衰减慢。
重根不是少一个解
如果特征方程只有一个重根 r,直接照搬不同实根的写法会出问题。写成 C1ert+C2e 只是 ,仍然只有一个自由常数,无法满足一般的两个初始条件。
重根情形的通解是:
y(t)=(C1+C2t)ert
也可以写成:
y(t)=C1ert+C2te
第二个基本解多了一个因子 t。这个 t 不是装饰,而是用来提供第二个独立方向。
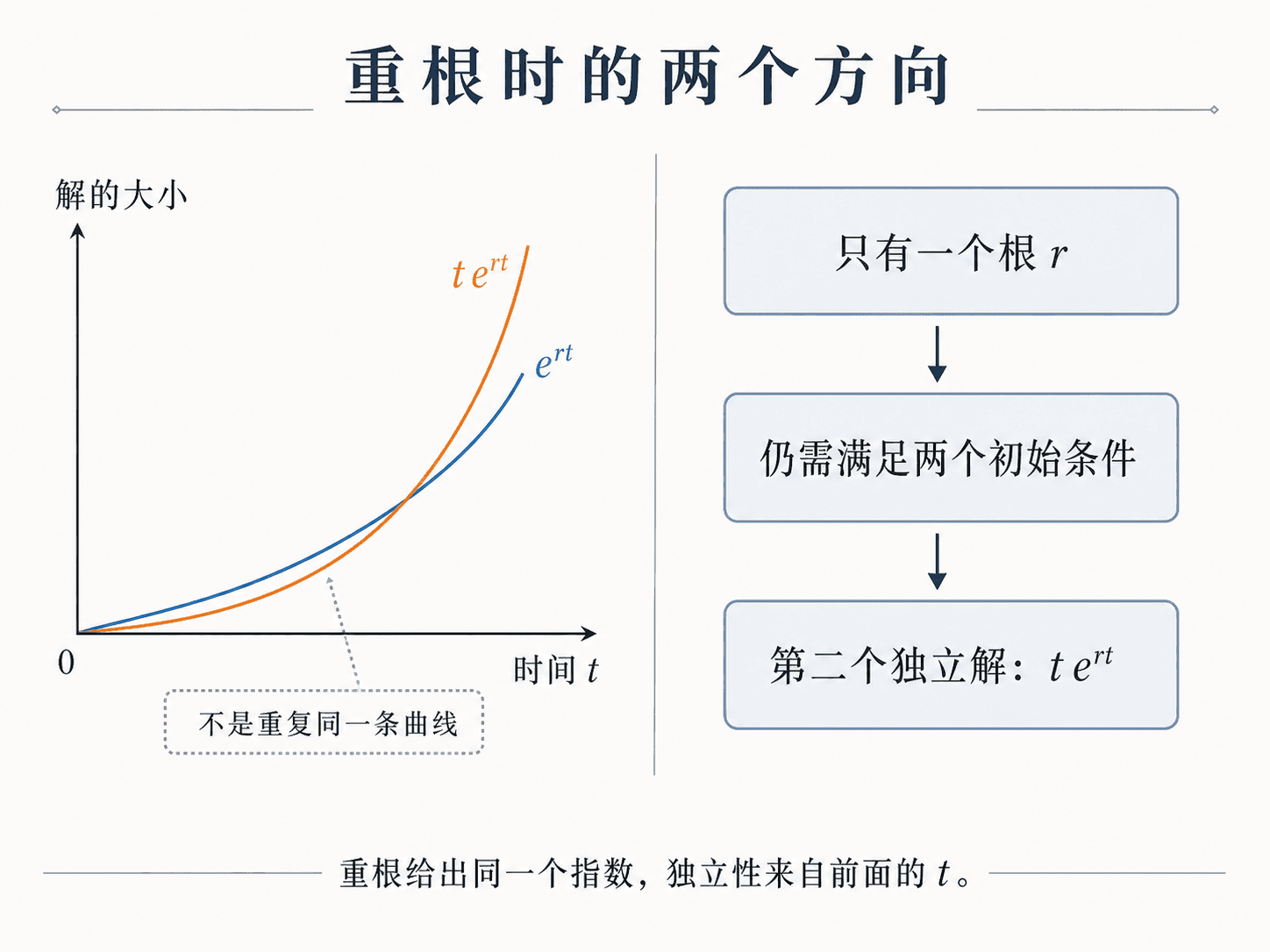 重根没有减少初值条件的数量。第二个独立解 tert 保留了二阶方程需要的两个自由常数。
重根没有减少初值条件的数量。第二个独立解 tert 保留了二阶方程需要的两个自由常数。
一个直观理解来自“让两个实根靠近”。当 r2 逐渐接近 r1 时,两个指数 er、 越来越像。为了保留第二个方向,可以看差商:
r2−r1er
令 r2→r1=r,极限就是:
tert
所以重根公式并不是硬背出来的。它是两个指数方向合并时留下来的“切向方向”。
再看一个初值问题:
y′′+4y′+4y=0,y(0)
特征方程为:
r2+4r+4=0
即:
(r+2)2=0
所以 r=−2 是重根,通解为:
y(t)=(C1+C2t)e−2t
由 y(0)=3 得 C1=3。再求导:
y′(t)=(C2−2C1
由 y′(0)=−2 得:
C2−2C1=−2
代入 C1=3,得到 C2=4。因此:
y(t)=(3+4t)e−2t
重根时最常见的错误是把通解写成 C1ert+C2er。这并没有两个独立解,只是把同一个函数写了两遍。二阶初值问题通常需要两个自由常数,少一个会让许多初值条件无法满足。
复根带来振荡
当判别式 Δ<0 时,特征方程没有实根,而是有一对共轭复根:
r=α±βi,β>0
这时可以先从复指数出发,再用 Euler 公式把答案改写成实函数。实值通解是:
y(t)=eαt(C1cosβt+C
这里的两个参数分工很清楚:β 控制振荡快慢,α 控制整体包络。若 α<0,振幅逐渐衰减;若 α=0,振幅不衰减;若 α>0,振幅会指数增长。
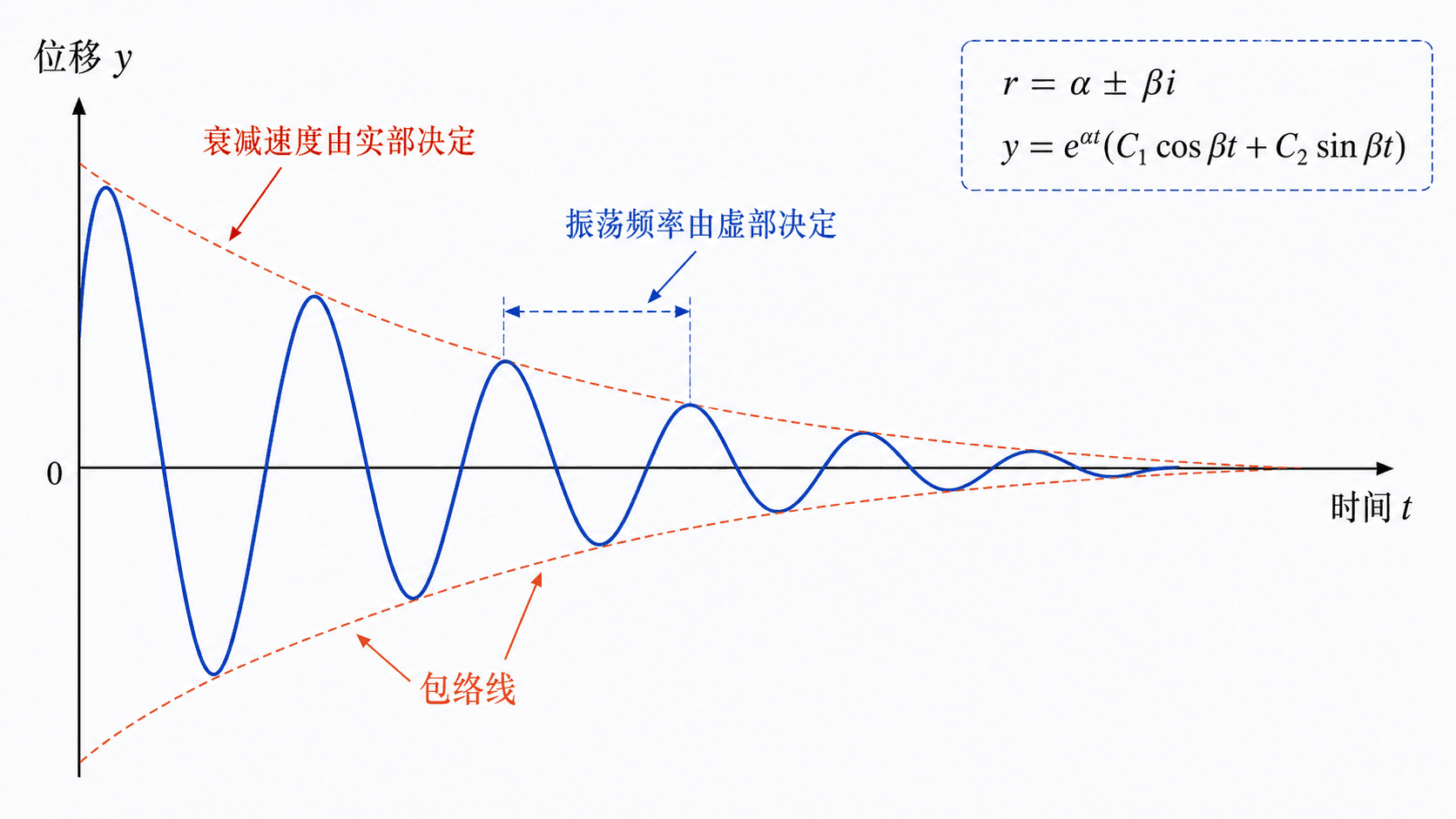 复根的虚部给出振荡,实部给出包络。阻尼振动可以看成“正弦波乘上指数因子”。
复根的虚部给出振荡,实部给出包络。阻尼振动可以看成“正弦波乘上指数因子”。
考虑:
x′′+2x′+5x=0,x(0)=
特征方程是:
r2+2r+5=0
根为:
r=−1±2i
于是:
x(t)=e−t(C1cos2t+C
由 x(0)=1 得 C1=1。求导并代入 t=0:
x′(0)=−C1+2C2
因为 x′(0)=0,所以 C2=2。最终:
x(t)=e−t(cos2t+21sin2t
这条曲线会来回穿过平衡位置,但每次振幅都比上一次小。这里的“振荡”来自 2i,“衰减”来自 −1。
若方程的系数都是实数,复根会成对出现:α+βi 与 α−βi。实际模型中的位移、电荷和电流通常是实值函数,所以最后要把复指数改写成余弦和正弦的组合。
弹簧、质量与阻尼
弹簧-质量-阻尼系统给了特征根一个具体解释。设 x(t) 是物体偏离平衡位置的位移,m 是质量,c 是阻尼系数,k 是弹簧劲度。没有外力时,Newton 第二定律给出:
mx′′+cx′+kx=0
这一式子中的三项分别对应惯性、阻尼和回复力。它们不是抽象符号:质量越大,系统越不愿改变速度;阻尼越大,速度被越快耗散;弹簧越硬,越强烈地把物体拉回平衡。
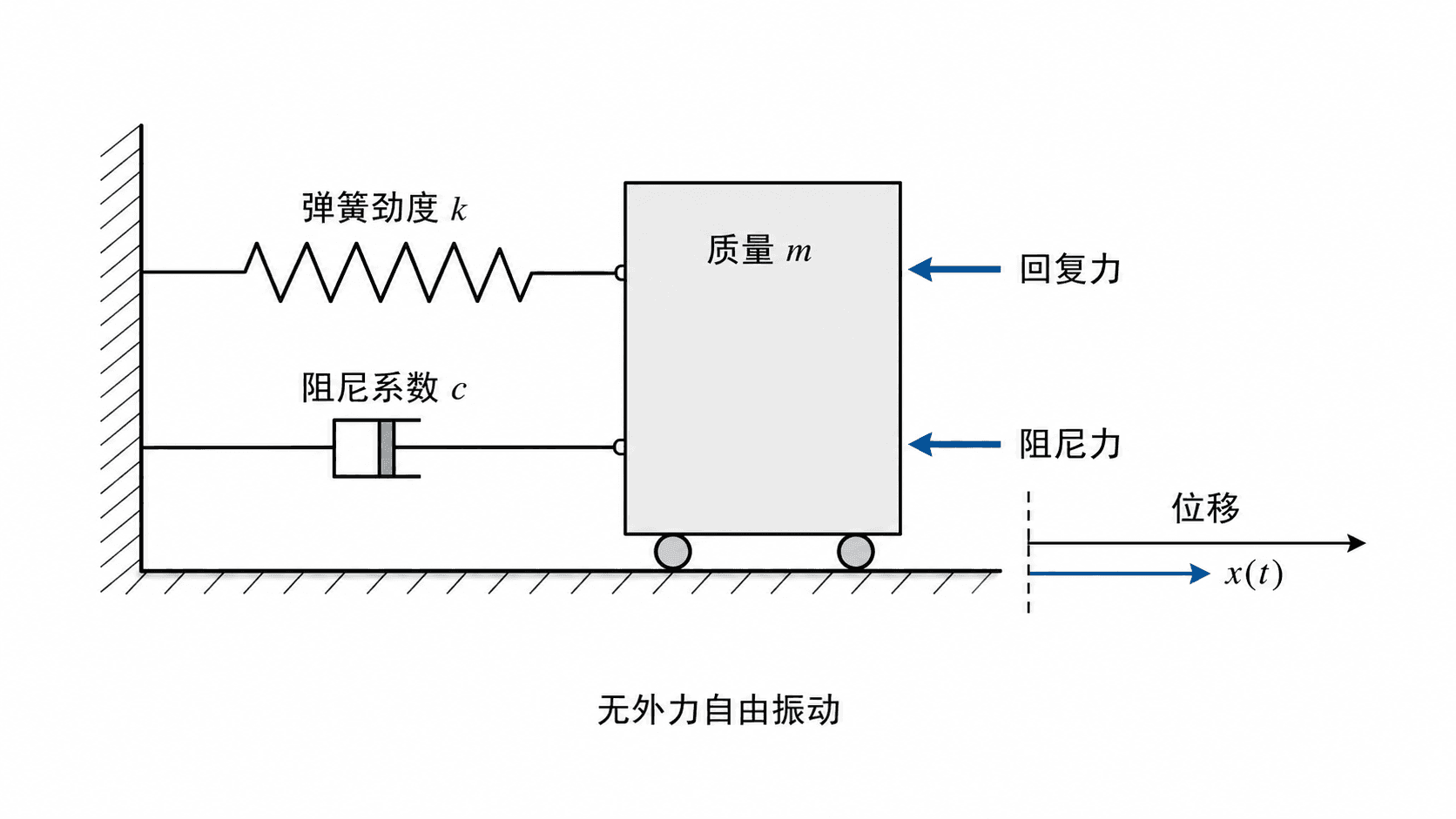 弹簧-质量-阻尼模型把 mx′′+cx′+kx=0 中的每一项都对应到一个物理部件。
弹簧-质量-阻尼模型把 mx′′+cx′+kx=0 中的每一项都对应到一个物理部件。
对应的特征方程是:
mr2+cr+k=0
判别式为:
c2−4mk
因此三种阻尼类型正好对应三种根型:
在固定 m 和 k 时,临界阻尼常被看成“不振荡地最快回到平衡”的分界。阻尼再小一点会振荡,阻尼再大一点反而会因为拖得太重而回得慢。
例如:
x′′+2x′+10x=0,x(0)=
这里 m=1,c=2,k=10,所以:
c2−4mk=4−40=−36<0
系统欠阻尼。根为:
r=−1±3i
解的形式为:
x(t)=e−t(C1cos3t+C
由 x(0)=0.08 得 C1=0.08。由 x′(0) 得:
−C1+3C2=0
所以 C2=30.08。因此:
x(t)=e−t(0.08cos3t+30.08sin
这个解的单位来自 x,若 x 用米表示,0.08 就是 8 厘米。指数因子 e−t 没有改变位移单位,它只描述振幅随时间缩小。
不要把“欠阻尼”理解成“不衰减”。只要 c>0,阻尼就在消耗能量,欠阻尼只是说明系统在回到平衡前会来回振荡。
RLC 电路中的同一类方程
同样的数学结构也出现在串联 RLC 电路中。设 q(t) 是电容上的电荷,i(t)=q′(t) 是电流。没有外加电压时,串联 RLC 电路满足:
Lq′′+Rq′+C1q=
它和弹簧-质量-阻尼方程并排看,几乎是同一个句子:
mx′′+cx′+kx=0
Lq′′+Rq′+C1q=
对应关系是:
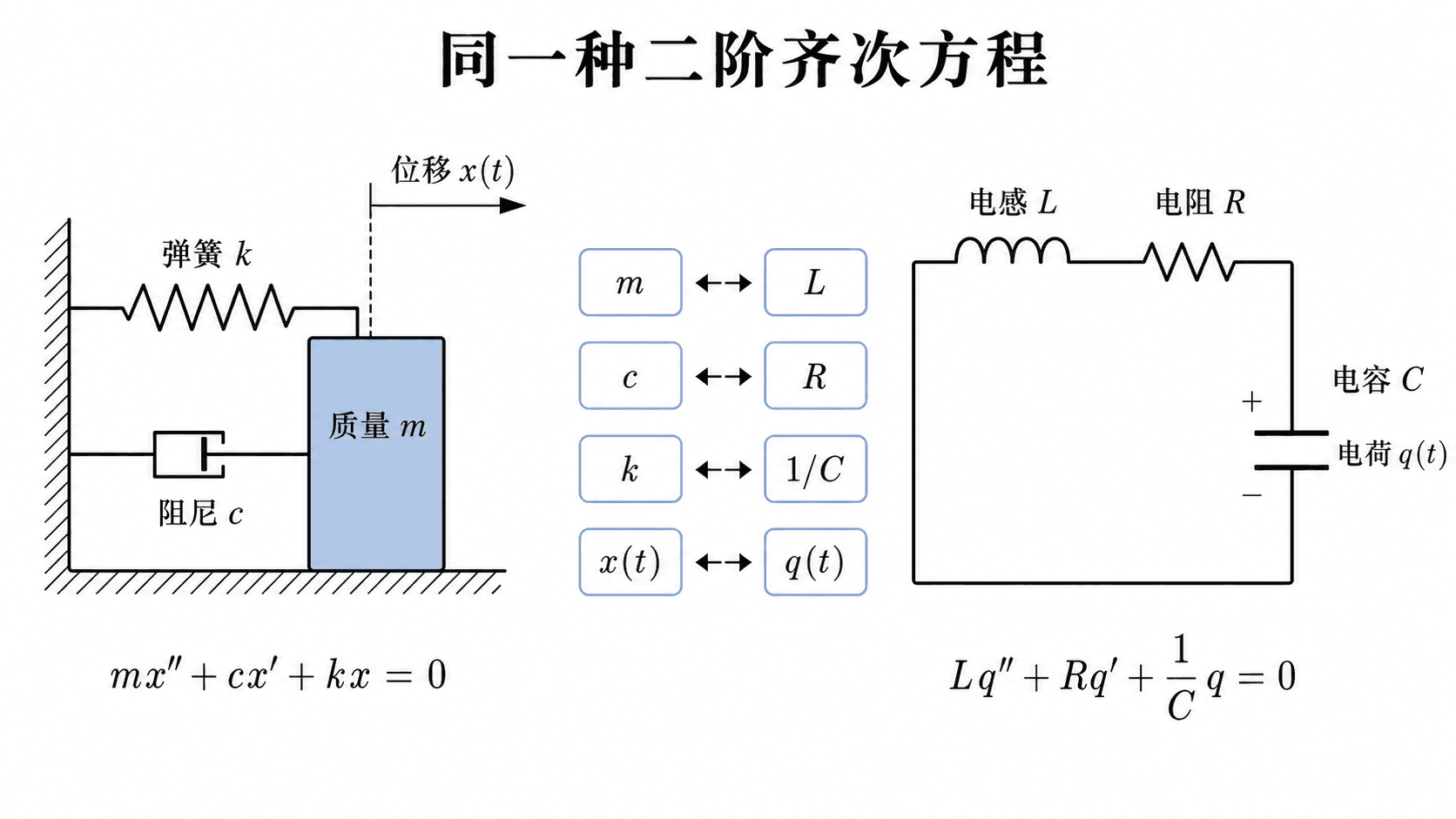 机械振动和 RLC 电路看起来不同,但自由响应由同一类二阶齐次方程描述。
机械振动和 RLC 电路看起来不同,但自由响应由同一类二阶齐次方程描述。
RLC 的特征方程是:
Lr2+Rr+C1=0
判别式为:
R2−C4L
若这个判别式小于 0,电荷和电流会出现衰减振荡;若等于 0,是临界情形;若大于 0,是非振荡的指数回落。
举一个无外加电压的例子:
q′′+4q′+5q=0,q
特征根为:
r=−2±i
所以:
q(t)=e−2t(C1cost+C
由 q(0)=1 得 C1=1,由 q′(0 得 。因此:
q(t)=e−2t(cost+2sint)
电路语言里,这表示电容上的电荷会在正负之间摆动,但幅度逐渐变小。机械语言里,这就是质量块在平衡位置两侧振动并逐渐停下。
解题时先读根,再读模型
二阶常系数齐次方程的计算流程可以压得很短,但每一步都应有含义:
把方程整理成标准形式 ay′′+by′+cy=,确认右端确实为 ,且 。若右端有外部输入,那是下一章的非齐次问题。
“齐次”只是在说右端为 0。它不表示所有系数相同,也不表示解必须从 0 出发。初值可以是任意给定的位置和速度;齐次系统仍然可能有丰富的自由响应。
练习
练习一:求解初值问题
y′′−y′−6y=0,y(0)
特征方程是:
r2−r−6=0分解得:
(r−3)(r+2)练习二:判断阻尼类型,并写出通解形式。
2x′′+6x′+5x=0
这里 m=2,c=6,k=5。判别式为:
c2−练习三:一个无外加电压的串联 RLC 电路满足:
q′′+4q′+4q=0
它对应哪一种阻尼情形?若 q(0)=2,q′(0)=−2,求 q(t)。
特征方程是:
r2+4r+4=0即:
(r+2)2本章之后,二阶方程不再只是“求根套公式”。你应该能从根读出响应:两个实根给非振荡指数运动,重根给临界边界,复根给振荡;机械系统和电路系统只是把同一种数学结构穿上了不同的单位和名字。