三维坐标、向量与空间几何
多变量微积分从一条数轴走向一片区域,再走向三维空间。空间里最先要解决的不是求导或积分,而是怎样说清楚一个点在哪里、一个物体朝哪里移动、一个平面怎样倾斜。
这部分让我们把这些语言整理成一套可计算的工具:坐标用来定位,向量用来表示位移和方向,点积用来比较方向和做投影,叉积用来找垂直方向和面积,直线和平面用方程表达。后面学习曲面、梯度、通量和 Stokes 定理时,这些工具会反复出现。
三维坐标系先解决定位问题
三维直角坐标系由三条互相垂直的坐标轴组成。一个点 P(x,y,z) 的三个数不是随意排列的标签,而是从原点出发,分别沿 x 轴、y 轴、z 轴移动的有向距离。
在平面解析几何里,一个点通常投影到两条坐标轴。三维空间多了一个坐标方向,也多了三个坐标平面:xy 平面、xz 平面、yz 平面。点的投影能帮助我们把空间问题拆回熟悉的二维或一维问题。
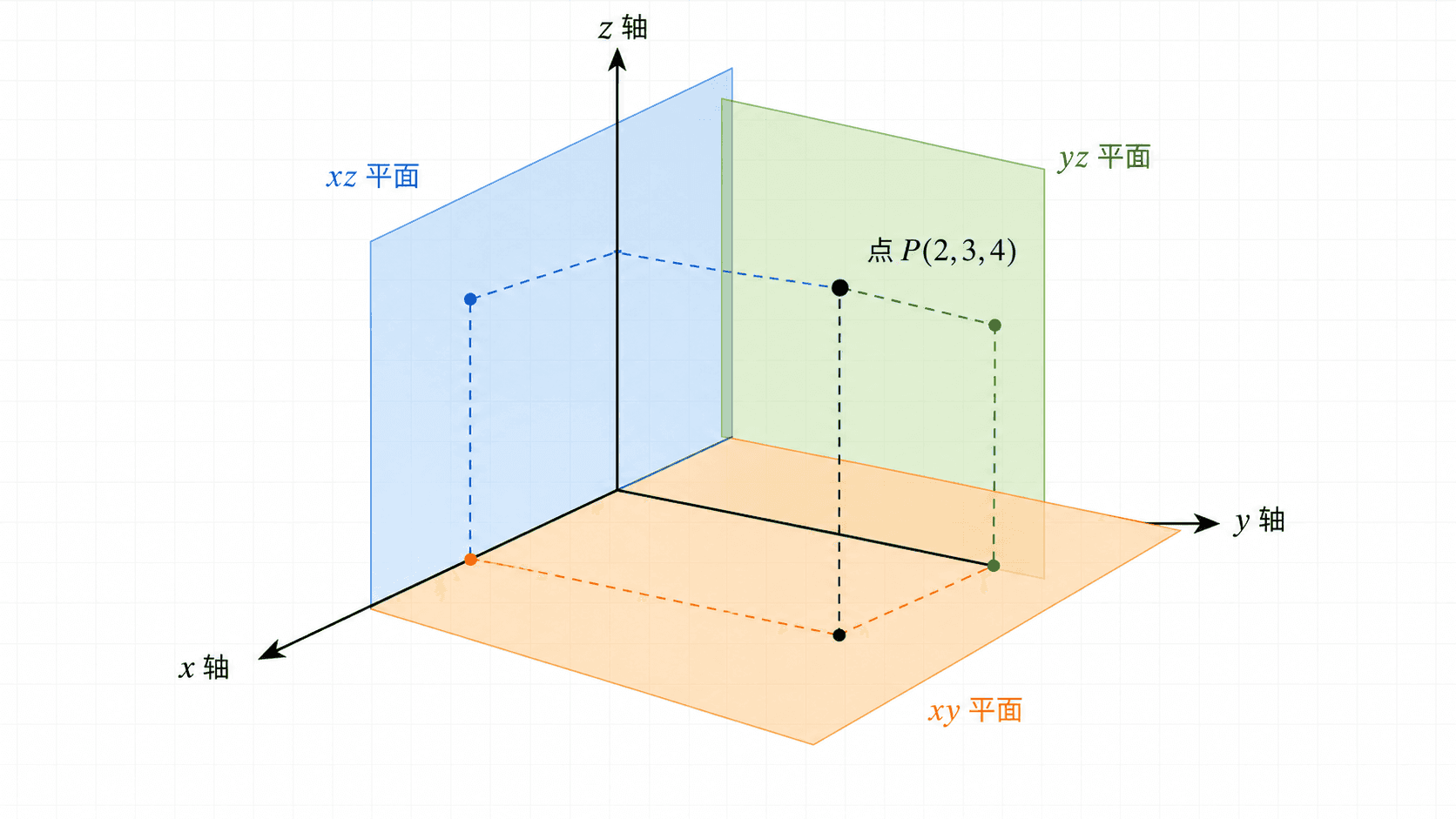
三维坐标不是把平面图“画得立体”而已,它给每个点一个可计算的位置。
两个点
P(x1,y1,z1),Q(x2,y2,z2)
之间的距离来自三次互相垂直的位移:
d(P,Q)=(x2−x1)2+(y2−y1)2+(z2−z1)2
中点坐标则是三个方向分别取平均:
M=(2x1+x2,2y1+y2,2z1+z2)
三维距离公式本质上还是勾股定理。先在一个坐标平面里算出水平位移的长度,再和第三个方向的位移组成直角三角形,就得到上面的公式。
例题:距离与中点
已知 A(−1,2,4),B(3,−2,1)。求线段 AB 的长度和中点。
先分别计算三个方向上的坐标差:
Δx=3−(−1)=4,Δy=−2−2=−4,Δz=1−4=−3把三个互相垂直的位移代入距离公式:
∣AB∣=42+(−4)2+(−3)2=41中点的三个坐标分别取平均:
M=(2−1+3,22+(−2),24+1)=(1,0,25)
向量记录位移而不是固定位置
点回答“在哪里”,向量回答“从哪里往哪里移动”。从 A(x1,y1,z1) 到 B(x2,y2,z2) 的位移向量是
AB=⟨x2−x1, y2−y1, z2−z1⟩
只要长度和方向相同,向量可以平移到空间中的任意位置。这个观点很重要:我们经常把一个方向向量移到原点、移到曲面上一点,或移到平面上一点,只要不改变它的分量,它仍是同一个向量。
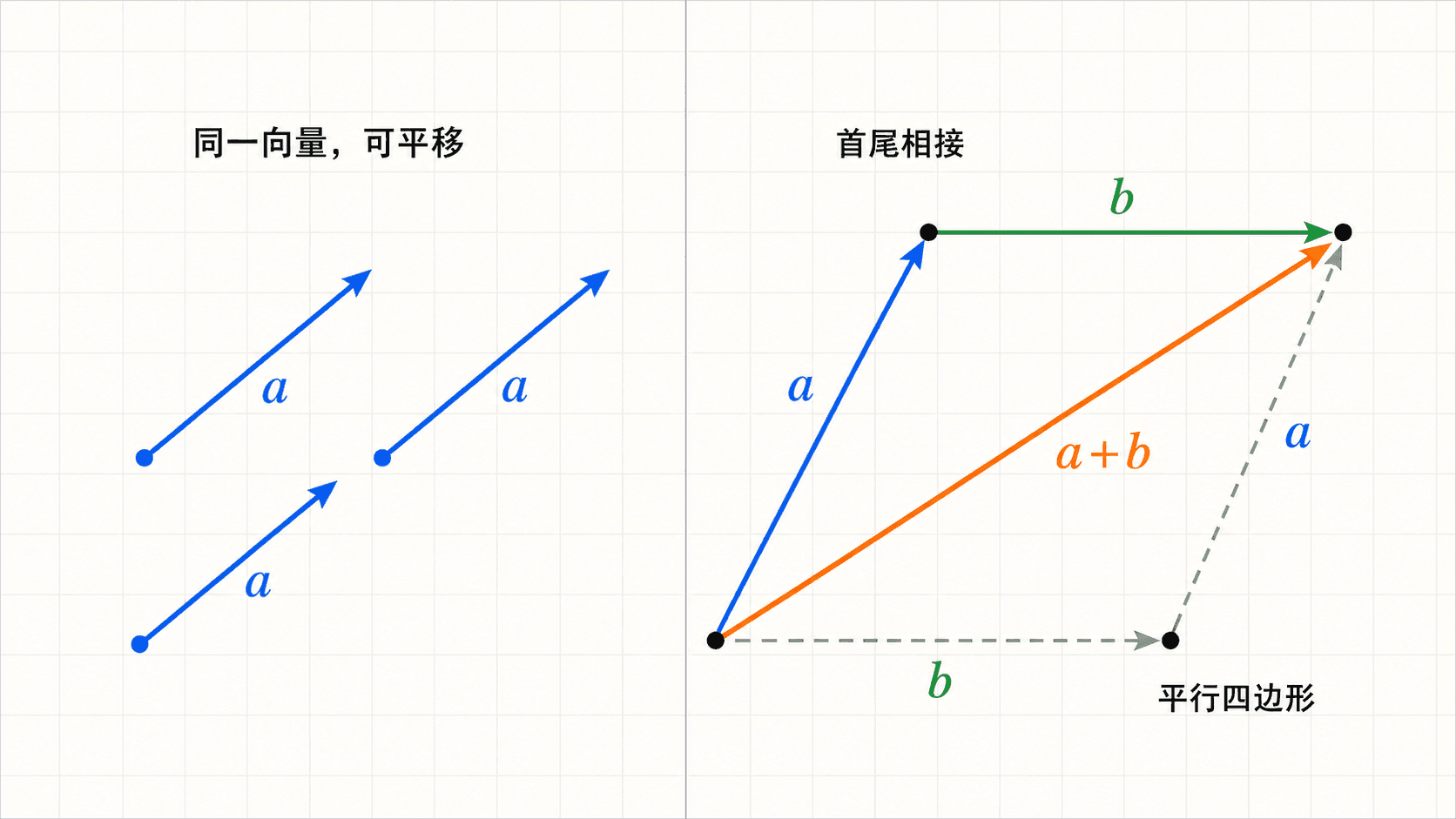
向量加法的几何意思是连续走两段位移。
若
a=⟨a1,a2,a3⟩,b=⟨b1,b2,b3⟩
则向量运算按分量进行:
a+b=⟨a1+b1, a2+b2, a3+b3⟩
ca=⟨ca1, ca2, ca3⟩
向量长度是它对应位移的距离:
∥a∥=a12+a22+a32
如果 a=0,与它同方向的单位向量是
∥a∥a
不要把点 P(2,3,4) 和向量 ⟨2,3,4⟩ 混成同一件事。它们使用同样的三个数,但语义不同:点是位置,向量是从某个起点出发的位移。把点看成原点到该点的位置向量时,才可以写成 OP=⟨2,3,4⟩。
例题:单位方向向量
从 A(1,−1,2) 指向 B(4,3,0) 的单位方向向量是什么?
先求位移向量:
AB=⟨4−1, 3−(−1), 0−2⟩=⟨3,4,−2⟩求它的长度:
∥AB∥=32+42+(−2)2=29用向量除以自身长度,得到单位方向向量:
u=⟨293,294,−292⟩
点积把方向接近程度变成数
点积有两个等价视角。按分量计算时,
a⋅b=a1b1+a2b2+a3b3
按几何解释时,
a⋅b=∥a∥∥b∥cosθ
其中 θ 是两个非零向量之间的夹角。这个公式告诉我们:点积不只是一串乘法加法,它在测量两个方向有多接近。
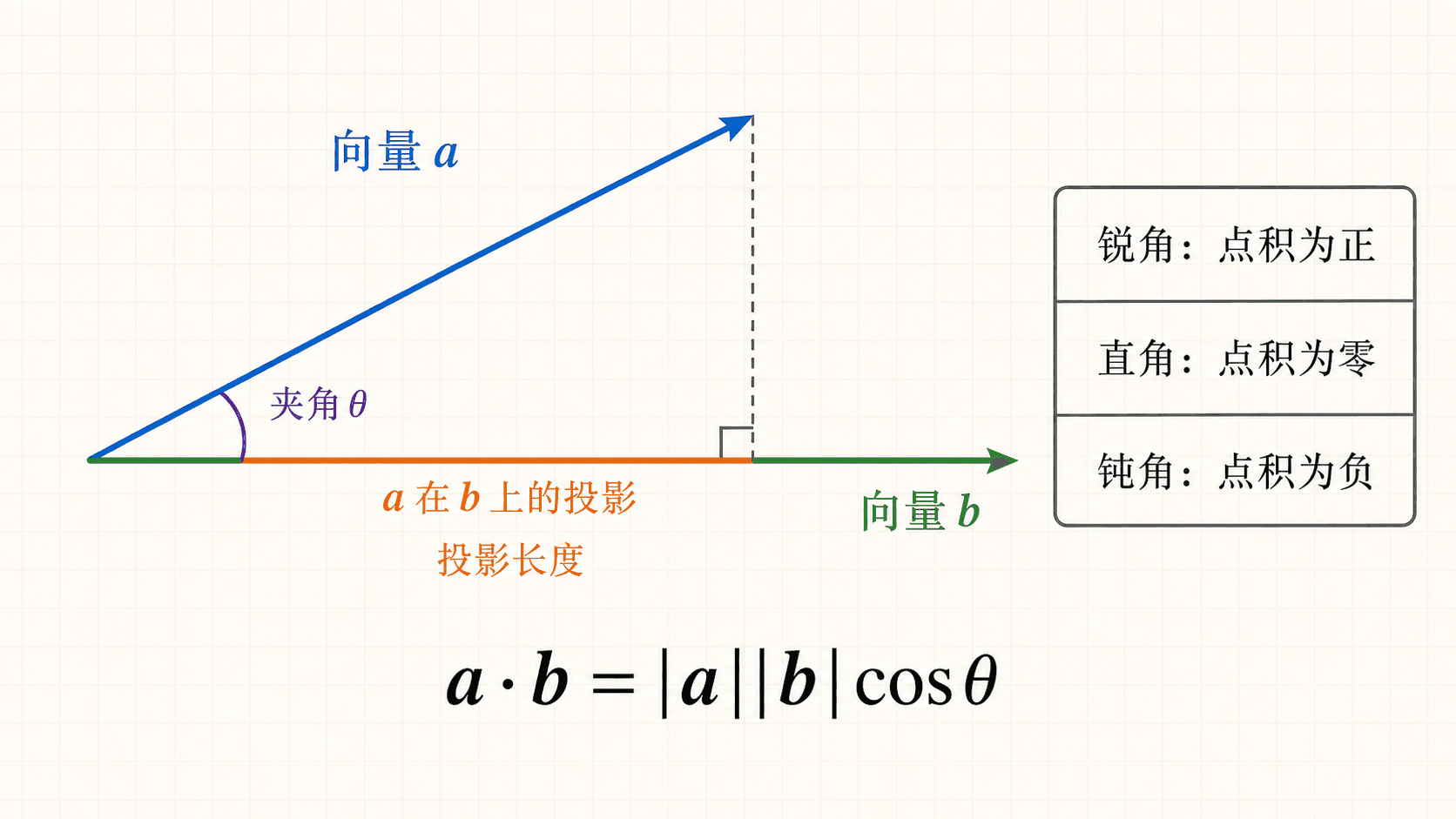
投影把“一个方向上的有效长度”单独取出来。
当夹角是锐角时,cosθ>0,点积为正;当夹角是直角时,点积为零;当夹角是钝角时,点积为负。这给垂直判断带来一个很短的判据:
a⊥b⟺a⋅b=0
向量 a 在 b 方向上的标量投影是
compba=∥b∥a⋅b
向量投影是
projba=∥b∥2a⋅bb
投影长度带符号。若 a 在 b 的反方向上成分更多,标量投影会是负数;这不是长度变成负数,而是方向相反的信号。
例题:夹角和投影
设
a=⟨2,−1,2⟩,b=⟨1,2,2⟩
求两向量夹角的余弦,并求 a 在 b 上的向量投影。
先算点积:
a⋅b=2⋅1+(−1)⋅2+2⋅2=4再算两个向量的长度:
∥a∥=22+(−1)2+22=3,∥b∥=12+22+22=3由点积的几何公式得到夹角余弦:
cosθ=∥a∥∥b∥a⋅b=94用投影公式求向量投影:
projba=94⟨1,2,2⟩=⟨94,98,98⟩
叉积产生垂直方向和面积
点积输出一个数,叉积输出一个新向量。对
a=⟨a1,a2,a3⟩,b=⟨b1,b2,b3⟩
叉积定义为
a×b=⟨a2b3−a3b2, a3b1−a1b3, a1b2−a2b1⟩
这个向量同时垂直于 a 和 b。它的方向由右手定则决定,它的长度等于由 a 和 b 张成的平行四边形面积:
∥a×b∥=∥a∥∥b∥sinθ
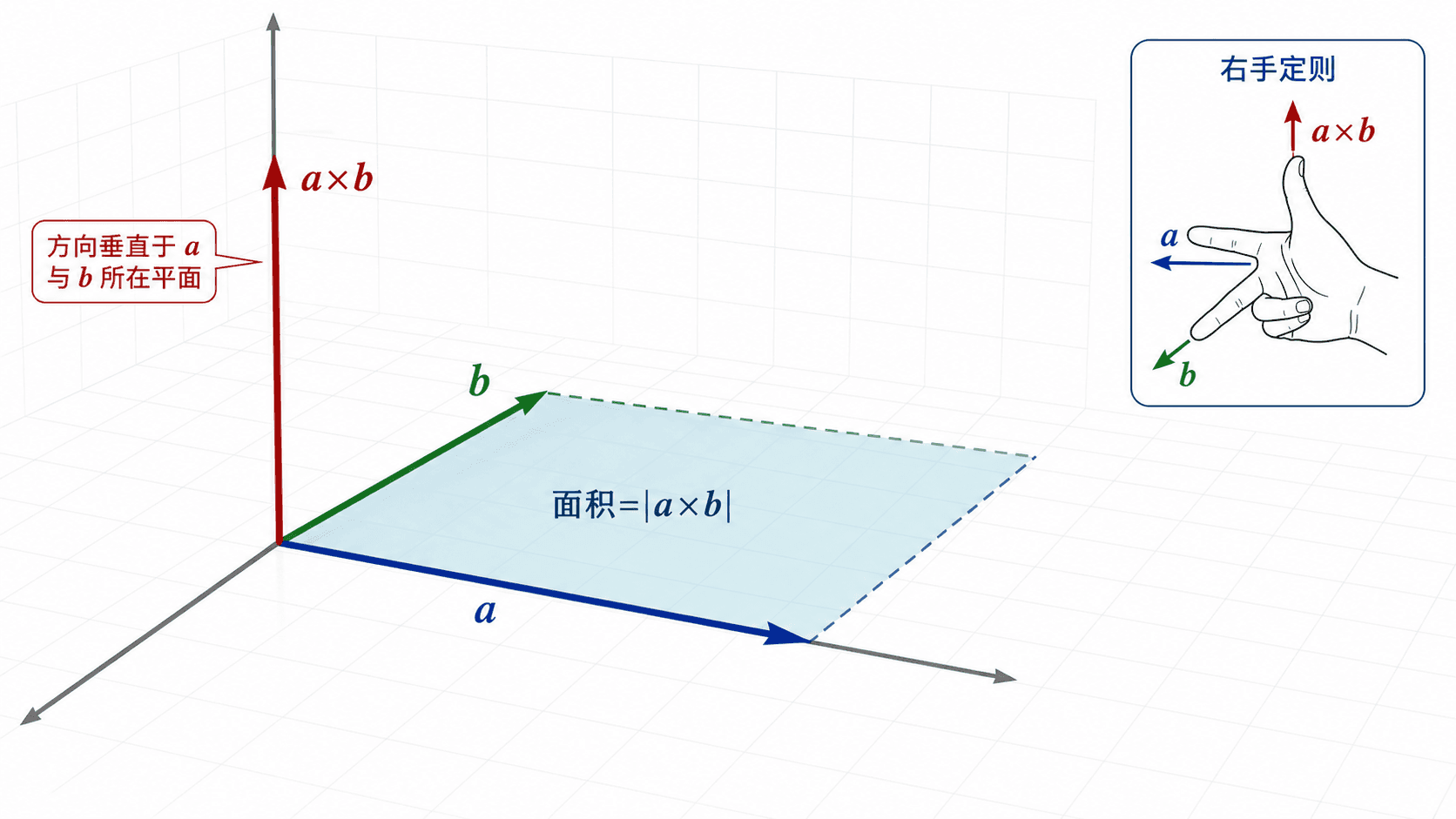
叉积给出的法向量会成为写平面方程的核心。
叉积最容易出错的地方是顺序。一般来说,
a×b=−(b×a)
交换顺序不会改变面积大小,但会把法向量方向反过来。
当两个非零向量平行时,sinθ=0,所以叉积为零向量。这个判据常用来判断空间直线的方向向量是否平行,也常用来检查三个点是否共线。
例题:用叉积求三角形面积
已知三角形的三个顶点为
A(1,0,2),B(3,1,1),C(2,4,3)
求三角形 ABC 的面积。
先从同一个顶点出发写两个边向量:
AB=⟨2,1,−1⟩,AC=⟨1,4,1⟩计算叉积:
AB×AC=⟨1⋅1−(−1)⋅4, (−1)⋅1−2⋅1, 2⋅4−1⋅1⟩=⟨5,−3,7⟩叉积长度是平行四边形面积:
∥⟨5,−3,7⟩∥=52+(−3)2+72=83三角形面积是对应平行四边形面积的一半:
S△ABC=283
空间直线是一点加一个方向
平面中的直线可以写成斜截式,但空间中没有一个单独的“斜率”能描述直线。更稳定的写法是:给出直线上的一点,再给出它的方向向量。
若直线经过点 P0(x0,y0,z0),方向向量是
v=⟨a,b,c⟩
则向量式为
r(t)=r0+tv
分量式为
x=x0+at,y=y0+bt,z=z0+ct
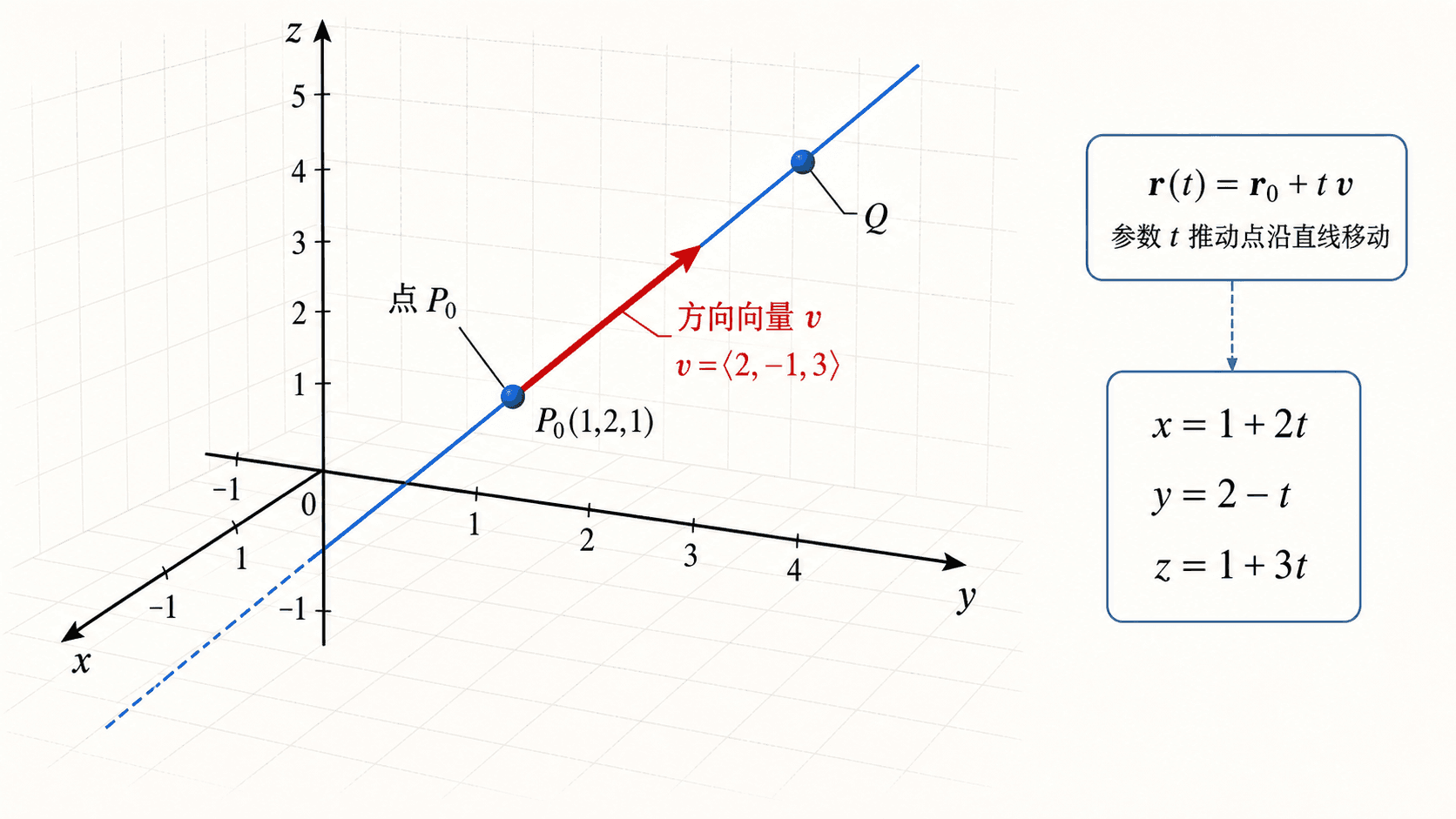
参数 t 不是新的空间坐标,它表示沿方向向量走了多少倍。
如果 a,b,c 都不为零,也可以写成对称式:
ax−x0=by−y0=cz−z0
若某个方向分量为 0,对称式里不能把它放在分母。例如方向向量 ⟨2,0,−1⟩ 表示 y 坐标不随参数变化,所以应保留 y=y0,而不是写出分母为 0 的式子。
两条空间直线的位置关系
两条空间直线可能相交、平行、重合,也可能异面。异面线是三维空间里新出现的情况:两条线不平行,却也没有交点,因为它们不在同一个平面内。
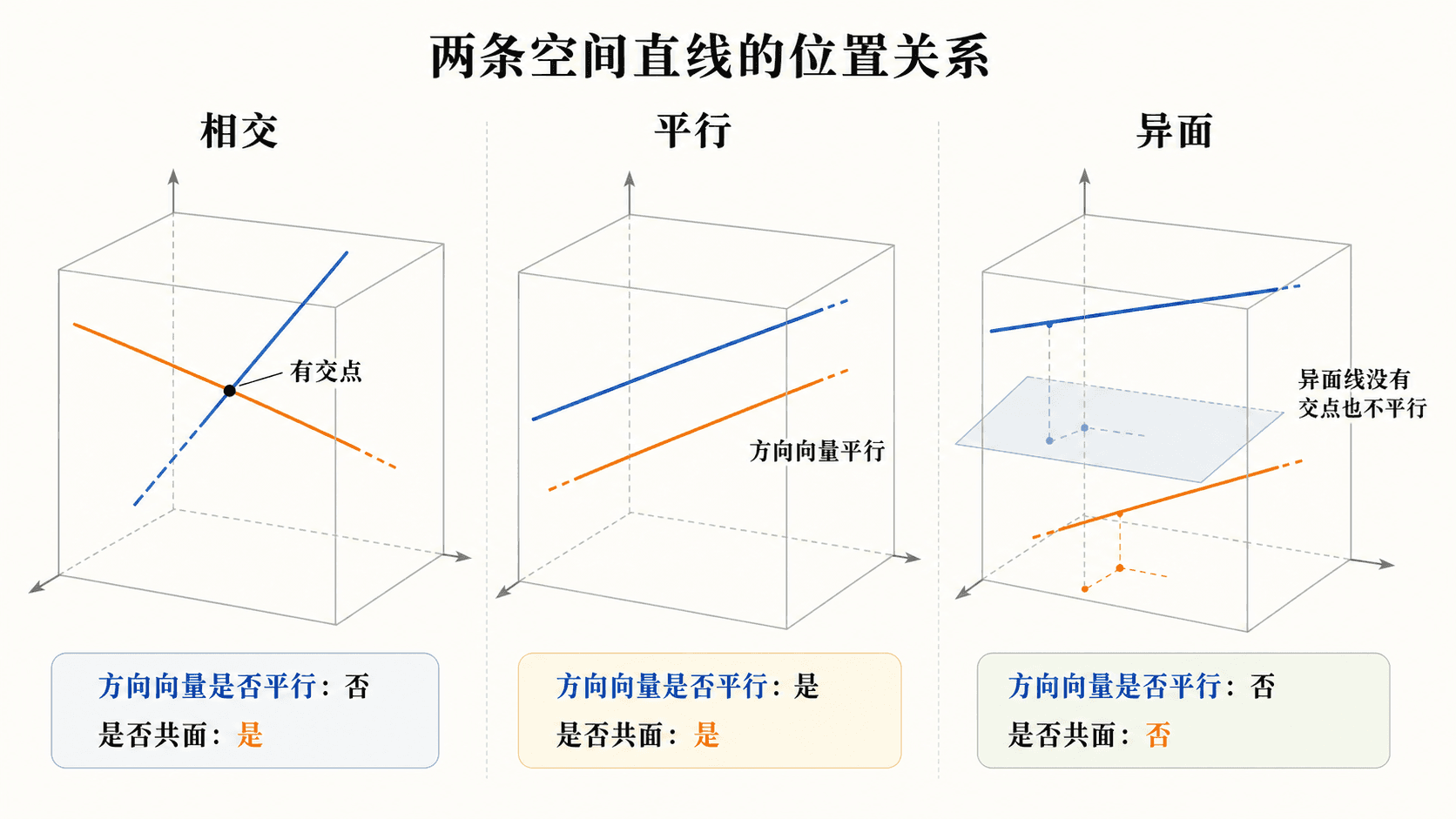
判断两条空间直线时,先看方向,再看是否能用参数找到同一个点。
在平面里,两条不平行的直线一定相交;在三维空间里,这句话不再成立。方向向量不平行只能说明它们不会平行,不能保证它们相交。
例题:判断两条直线是否相交
判断下面两条直线的位置关系:
L1: r=⟨1,0,2⟩+s⟨2,1,−1⟩
L2: r=⟨3,1,1⟩+t⟨1,−1,2⟩
先比较方向向量 ⟨2,1,−1⟩ 与 ⟨1,−1,2⟩。它们不是倍数关系,所以两直线不平行,也不重合。
若两线相交,应存在 s,t 让三个坐标同时相等:
1+2s=3+t,s=1−t,2−s=1+2t由第二式得 s=1−t。代入第一式:
1+2(1−t)=3+t解得 t=0,于是 s=1。
把 s=1,t=0 代入第三式:
2−1=1+2⋅0等式成立,所以两直线相交,交点是 L2 在 t=0 时的点:
(3,1,1)
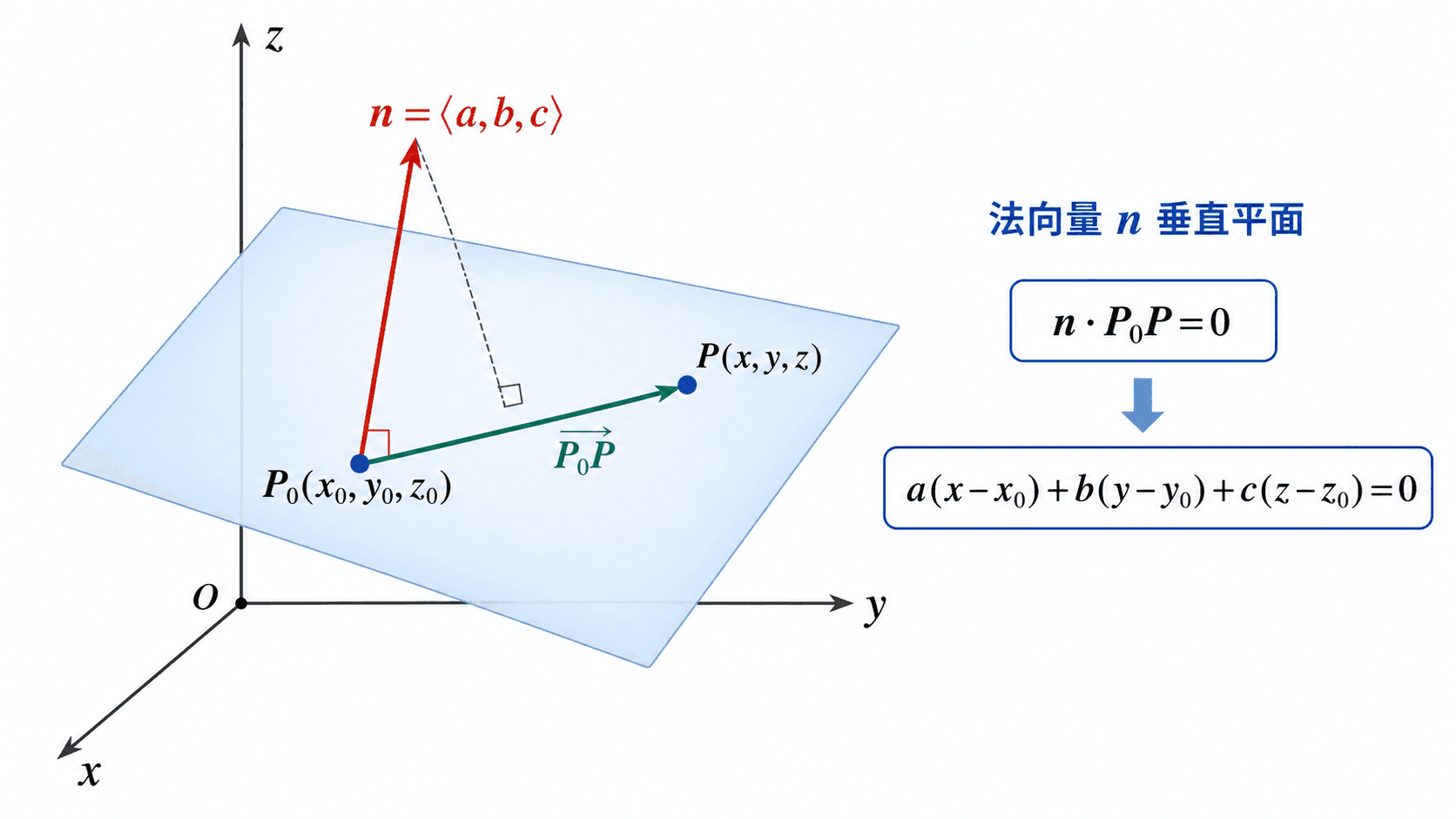
平面由法向量控制倾斜方式
空间中的平面也可以由“点”和“方向”描述,但一个平面有无数个方向。更简洁的方式是给出平面上一点 P0(x0,y0,z0),再给出一个垂直于平面的非零向量
n=⟨A,B,C⟩
这个向量叫法向量。平面上任意点 P(x,y,z) 都满足:从 P0 指向 P 的向量与法向量垂直。
n⋅P0P=0
展开后得到点法式:
A(x−x0)+B(y−y0)+C(z−z0)=0
也可以整理成一般式:
Ax+By+Cz=D
法向量不在平面内,它指出平面“朝哪边垂直”。
由三个点写平面方程
只要三个点不共线,它们确定一个平面。做法是先从其中一个点出发,构造平面内的两个向量;再用叉积得到法向量;最后代入点法式。
例题:三个点确定平面
求经过
A(1,0,2),B(2,1,0),C(0,3,1)
的平面方程。
先取两个平面内向量:
AB=⟨1,1,−2⟩,AC=⟨−1,3,−1⟩用叉积求法向量:
AB×AC=⟨1⋅(−1)−(−2)⋅3, (−2)⋅(−1)−1⋅(−1), 1⋅3−1⋅(−1)⟩=⟨5,3,4⟩用点 A(1,0,2) 和法向量 ⟨5,3,4⟩ 写点法式:
5(x−1)+3(y−0)+4(z−2)=0整理得到一般式:
5x+3y+4z=13平面方程 Ax+By+Cz=D 中,⟨A,B,C⟩ 就是法向量。看到一般式时,不需要重新推导法向量,直接读出三个系数即可。
向量语言会贯穿后面的多变量微积分
这一章的公式看起来像解析几何,但它们并不会停留在几何题里。向量会用来描述运动方向,点积会出现在方向导数和功的计算中,叉积会给曲面法向量,平面会成为切平面的模型。
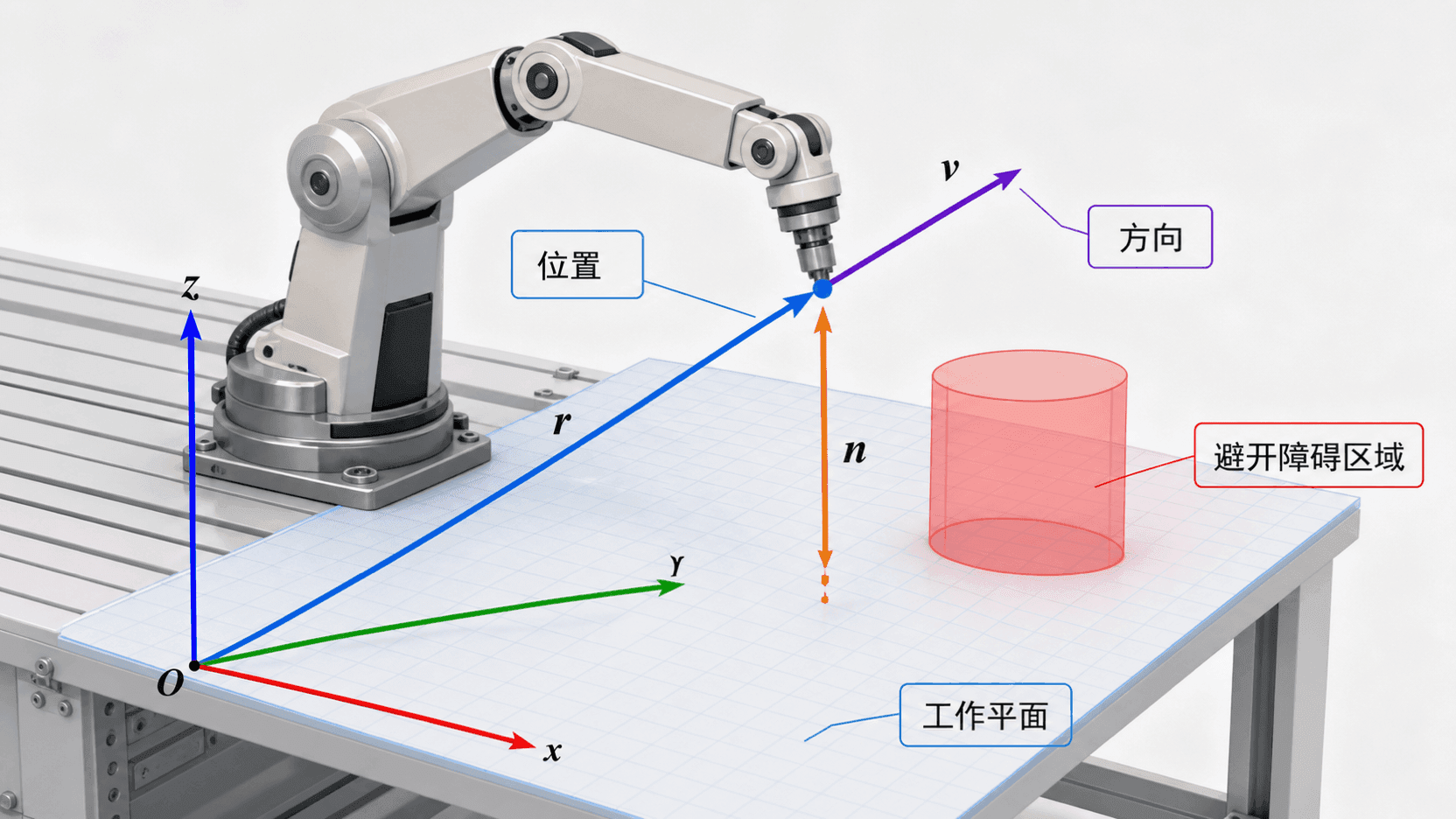
在工程模型中,“位置、方向、约束平面”通常同时出现。
后面学习 z=f(x,y) 的切平面时,我们会把曲面在一点附近近似成平面;学习梯度时,会用点积计算某个方向上的变化率;学习通量时,会用法向量描述穿过曲面的方向。现在建立的语言越稳,后面的计算就越少靠记忆。
一个实用检查流程
遇到空间几何题时,可以先按下面的顺序整理信息。
先分清对象是点、向量、直线还是平面。点有位置,向量有方向和长度,直线需要一点和一个方向,平面需要一点和一个法向量。
如果题目给了两个点,优先把它们相减得到位移向量;如果给了三个点,优先构造两个边向量。
需要夹角、投影或垂直判断时,考虑点积;需要面积、法向量或平行判断时,考虑叉积。
写直线方程时使用参数;写平面方程时使用法向量。不要强行把空间直线写成平面中的斜截式。
练习
坐标与距离
已知 P(2,−1,5),Q(−2,3,1)。求 ∣PQ∣ 和线段 PQ 的中点。
坐标差为 Δx=−4,Δy=4,Δz=−4,所以
∣PQ∣=(−4)2+42+(−4)2=43中点为
M=(22+(−2),2−1+3,25+1)=(0,1,3)向量长度与单位向量
设 v=⟨−2,1,2⟩。求 ∥v∥,并写出与 v 同方向的单位向量。
∥v∥=(−2)2+12+22=3同方向单位向量为
∥v∥v=⟨−32,31,32⟩ 点积与夹角
设 a=⟨1,2,−2⟩,b=⟨2,0,1⟩。判断两向量夹角是锐角、直角还是钝角。
a⋅b=1⋅2+2⋅0+(−2)⋅1=0点积为零,所以两向量垂直,夹角是直角。
投影
设 a=⟨3,1,0⟩,b=⟨1,1,1⟩。求 a 在 b 上的向量投影。
a⋅b=4,∥b∥2=3因此
projba=34⟨1,1,1⟩=⟨34,34,34⟩ 叉积与面积
设 u=⟨1,0,2⟩,v=⟨0,3,1⟩。求由 u 和 v 张成的平行四边形面积。
u×v=⟨0⋅1−2⋅3, 2⋅0−1⋅1, 1⋅3−0⋅0⟩=⟨−6,−1,3⟩面积为
∥u×v∥=(−6)2+(−1)2+32=46 直线方程
写出经过 P0(2,−1,3),方向向量为 ⟨1,4,−2⟩ 的直线参数方程。
参数方程为
x=2+t,y=−1+4t,z=3−2t也可以写成向量式
r(t)=⟨2,−1,3⟩+t⟨1,4,−2⟩平面方程
求经过点 P0(1,2,−1),法向量为 ⟨2,−3,4⟩ 的平面方程。
点法式为
2(x−1)−3(y−2)+4(z+1)=0整理得
2x−3y+4z+8=0或写成
2x−3y+4z=−8三点确定平面
判断 A(0,0,0),B(1,2,1),C(2,4,2) 是否能确定唯一平面。
先写两个向量:
AB=⟨1,2,1⟩,AC=⟨2,4,2⟩因为
AC=2AB三点共线,不能确定唯一平面。经过同一直线的平面有无数个。