三角、指数与对数函数的导数
弹簧上的小球来回振动,位置可以写成一个正弦或余弦函数。培养皿里的细菌在资源充足时增长,数量常被近似写成指数函数。声波、潮汐、交流电、放射性衰减、复利和药物代谢也会反复遇到这些函数。
前面学过的多项式、根式和有理函数已经能处理不少变化率问题,但它们还不够。周期现象需要三角函数,持续按比例变化的现象需要指数函数,对数量级、倍数和反函数关系的分析需要对数函数。本章要做的事很直接:把这些熟悉的函数接入导数语言,理解它们的斜率、速度和瞬时增长率。
周期函数的斜率
先看 y=sinx。在 x=0 附近,正弦曲线正在向上穿过原点,斜率接近 1;在 x=2π 附近,它到达最高点,切线水平,斜率为 0;在 x=π 附近,它向下穿过轴线,斜率接近 −1。这些斜率的变化本身正好排成一条余弦曲线。
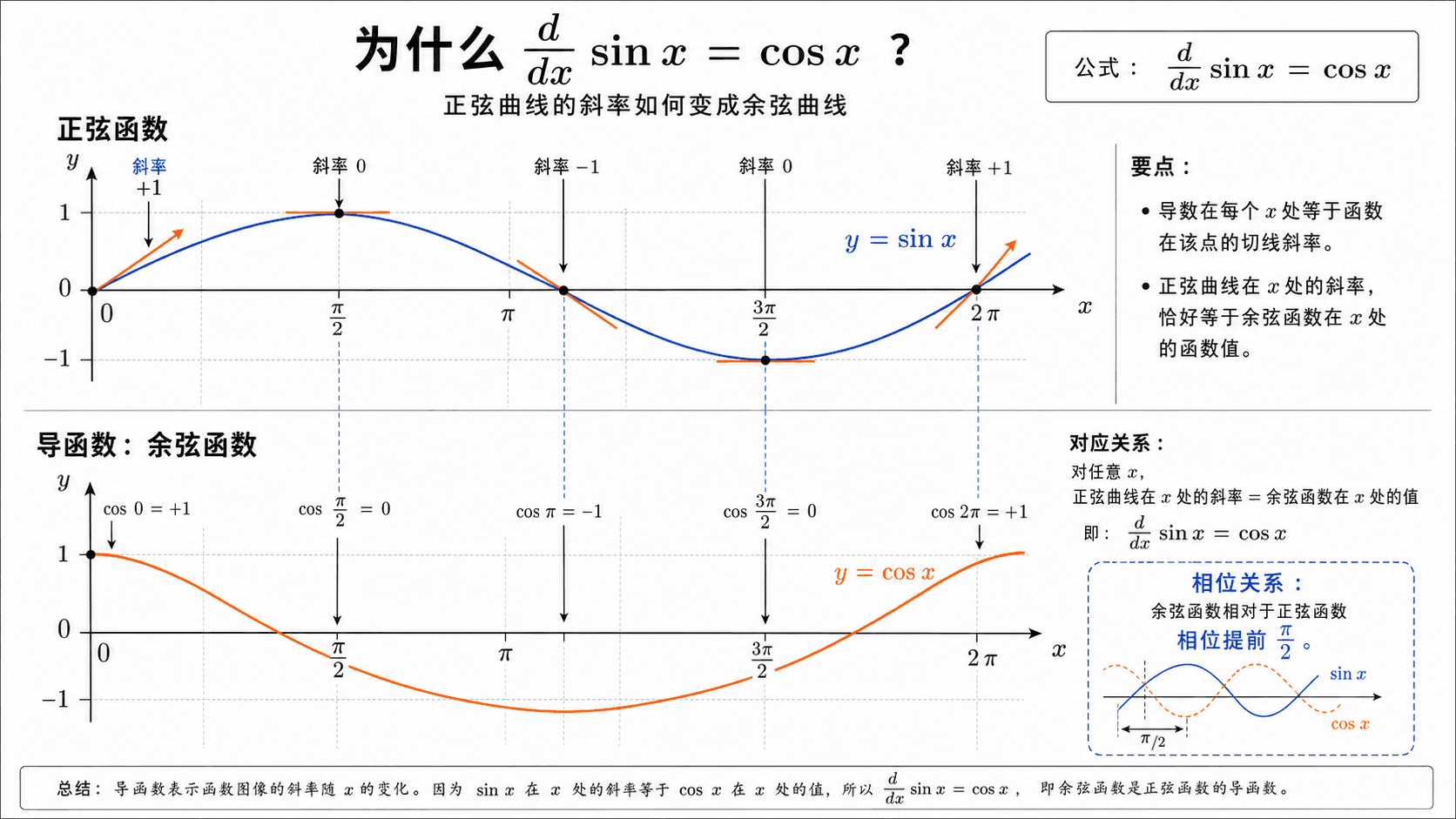
正弦函数的导数不是新的曲线类型,而是同一个周期系统中相位提前的余弦曲线。
基本公式是:
dxdsinx=cosx
dxdcosx=−sinx
余弦函数的导数前面多了一个负号。直觉上看,y=cosx 在 x=0 处位于最高点,斜率为 0;过了最高点以后开始下降,斜率为负。这个负号记录的正是“从最高点往下走”的方向。
这些公式默认角度用弧度制。若把输入当成角度制,limh→0hsinh=1 这个基础极限会改变,导数公式也会多出换算常数。微积分里的三角函数,除非特别说明,都按弧度理解。
正切函数可以写成商:
tanx=cosxsinx
用商法则求导,得到:
dxdtanx=sec2x
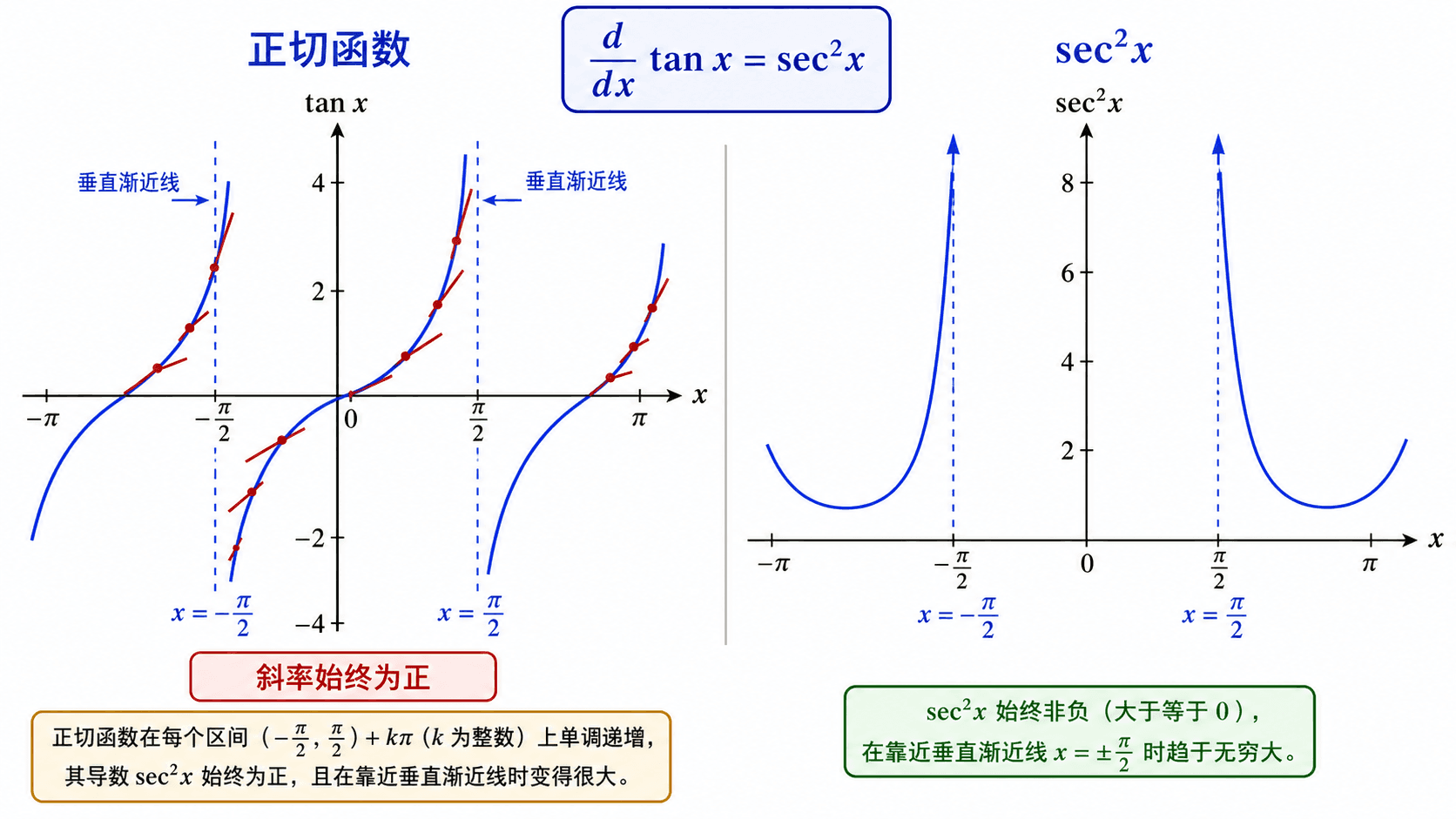
正切函数在每个定义区间内都递增,因此导数 sec2x 始终为正;靠近垂直渐近线时斜率迅速变大。
如果内部还有一个函数 u(x),要把链式法则一起用上:
dxdsinu(x)=cosu(x)⋅u′(x)
dxdcosu(x)=−sinu(x)⋅u′(x)
dxdtanu(x)=sec2u(x)⋅u′(x)
例题:简谐运动的速度
一个小滑块在水平弹簧上做近似简谐运动。它相对平衡位置的位移为
s(t)=0.08cos(4πt−6π)
其中 s(t) 的单位是米,t 的单位是秒。求速度函数 v(t),并说明最大速率是多少。
速度是位移对时间的导数,所以先写成 v(t)=s′(t)。这里真正被求导的是一个复合函数,外层是余弦,内层是 4πt−6π。
对余弦求导会得到负的正弦,同时乘以内层导数 4π:
v(t)=0.08⋅[−sin(4πt−6π)]⋅4π整理常数,得到速度函数:
v(t)=−0.32πsin(4πt−6π)因为 sin 的取值范围是 [−1,1],速度的绝对值最大为 0.32π。所以最大速率是
0.32π 米/秒约为 1.01 米/秒。
这个例子里,位置函数是余弦,速度函数是负的正弦。速度达到最大时,滑块往往正经过平衡位置;位置到达最高或最低端点时,速度为 0。导数把“位置图像”换成了“运动快慢图像”。
指数函数的瞬时增长率
指数函数最特别的地方是:变化率和当前数量绑在一起。数量越大,下一瞬间增加得越快;数量越小,下一瞬间变化也越小。
自然指数函数 ex 是这个家族里最简洁的一个:
dxdex=ex
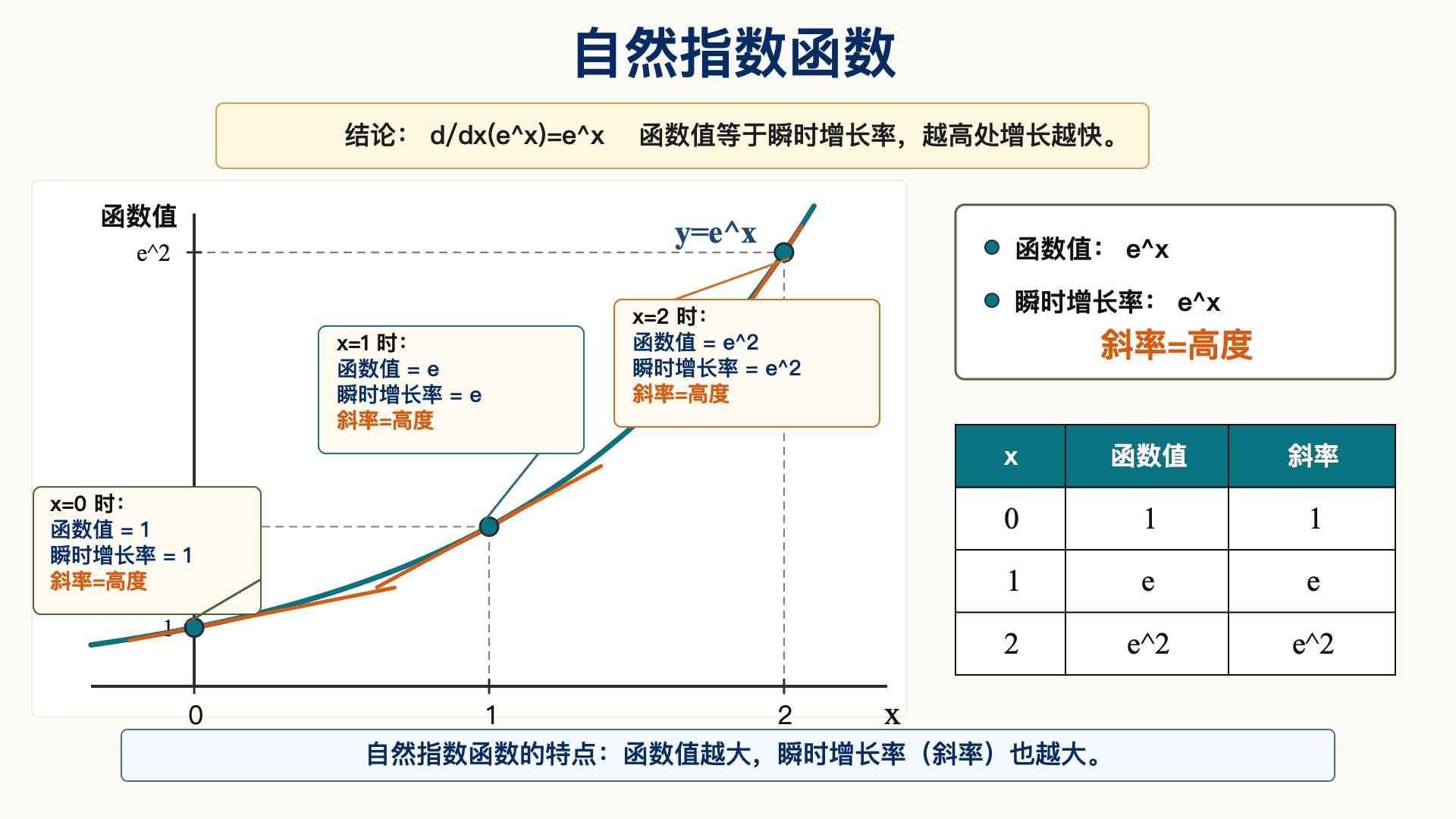
在 y=ex 上,曲线高度和切线斜率由同一个表达式 ex 给出。
这条公式不是说指数函数“长得很快”这么笼统,而是说在每个 x 处,它的瞬时变化率正好等于它的当前函数值。比如 x=0 时,函数值为 1,斜率也为 1;x=2 时,函数值为 e2,斜率也为 e2。
一般底数的指数函数要多乘一个常数:
dxdax=axlna
其中 a>0 且 a=1。
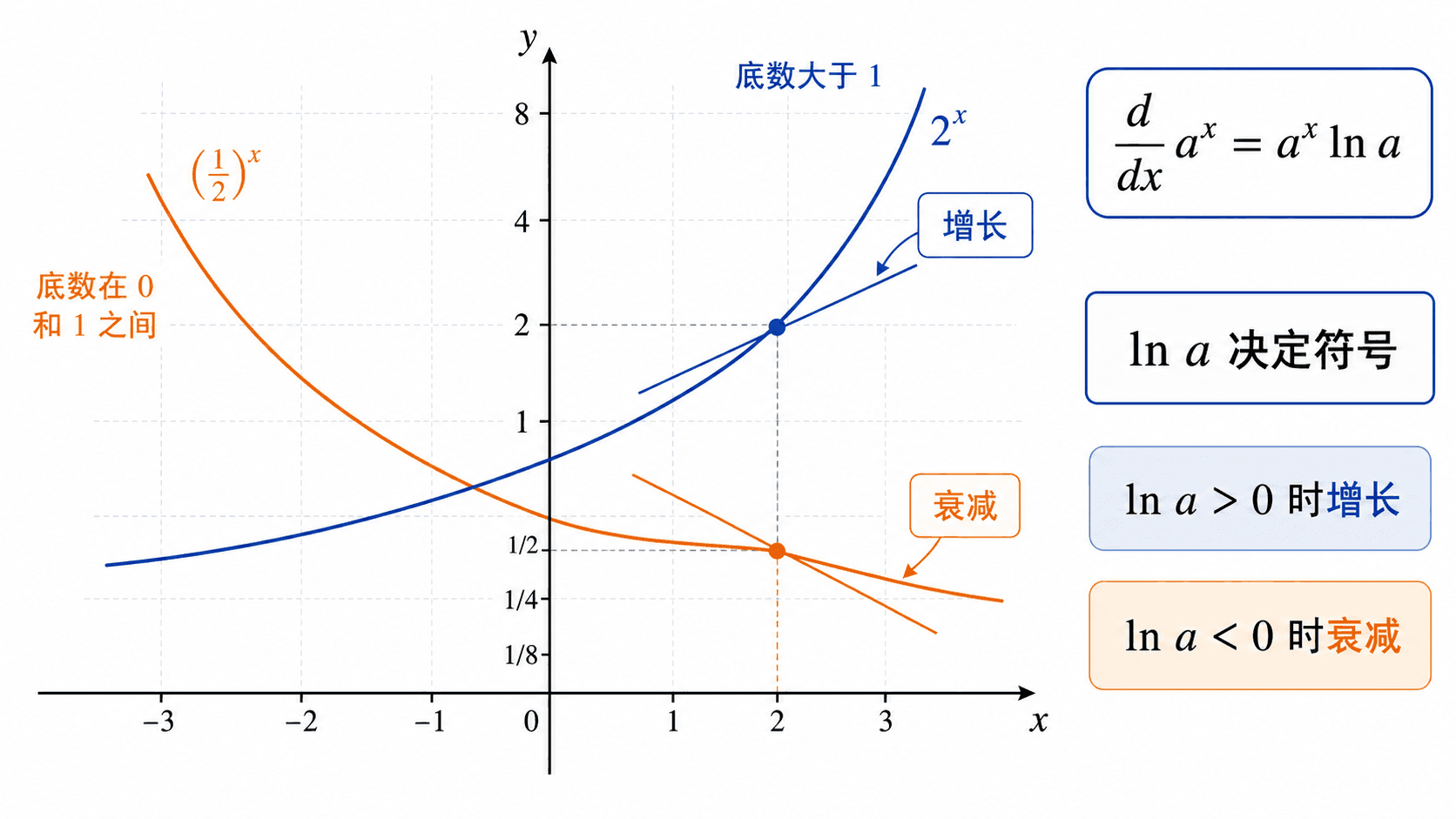
底数 a 的作用通过 lna 进入导数:a>1 时增长,0<a<1 时衰减。
当 a>1 时,lna>0,导数为正,函数增长;当 0<a<1 时,lna<0,导数为负,函数衰减。底数不只是图像形状的参数,它还直接决定导数的符号和变化速度。
若指数的内部是 u(x),仍然要乘以内层导数:
dxdeu(x)=eu(x)u′(x)
dxdau(x)=au(x)lna⋅u′(x)
指数增长模型常写成 y=y0ekt。它的导数是 y′=ky,所以 k 描述的是相对增长率,ky 才是某一时刻的绝对增长速度。两个量单位不同,含义也不同。
例题:指数增长模型的瞬时增长率
某培养皿中细菌数量可近似表示为
P(t)=500e0.18t
其中 t 以小时计,P(t) 表示细菌数。求 t=4 小时时的细菌数量和瞬时增长率。
先求数量。把 t=4 代入模型:
P(4)=500e0.72近似为 1027。
对模型求导。由于 0.18t 的导数是 0.18,所以
P′(t)=500e0.18t⋅0.18把原函数 P(t)=500e0.18t 代回,可以写成更有解释力的形式:
P′(t)=0.18P(t)这表示每一小时的瞬时增长率约为当前数量的 18%。
代入 t=4:
P′(4)=0.18⋅500e0.72≈185因此第 4 小时时,模型给出的瞬时增长率约为每小时增加 185 个细菌。
这里的 185 不是从第 4 小时到第 5 小时的实际增加量,而是 t=4 这一刻切线的斜率。指数模型中,数量越大,这个斜率越大。
对数函数的斜率
对数函数和指数函数互为反函数。自然对数 y=lnx 的导数是:
dxdlnx=x1
这个公式只在 x>0 时讨论,因为 lnx 的定义域就是正数。它的图像靠近 0 时很陡,向右走时越来越平缓。
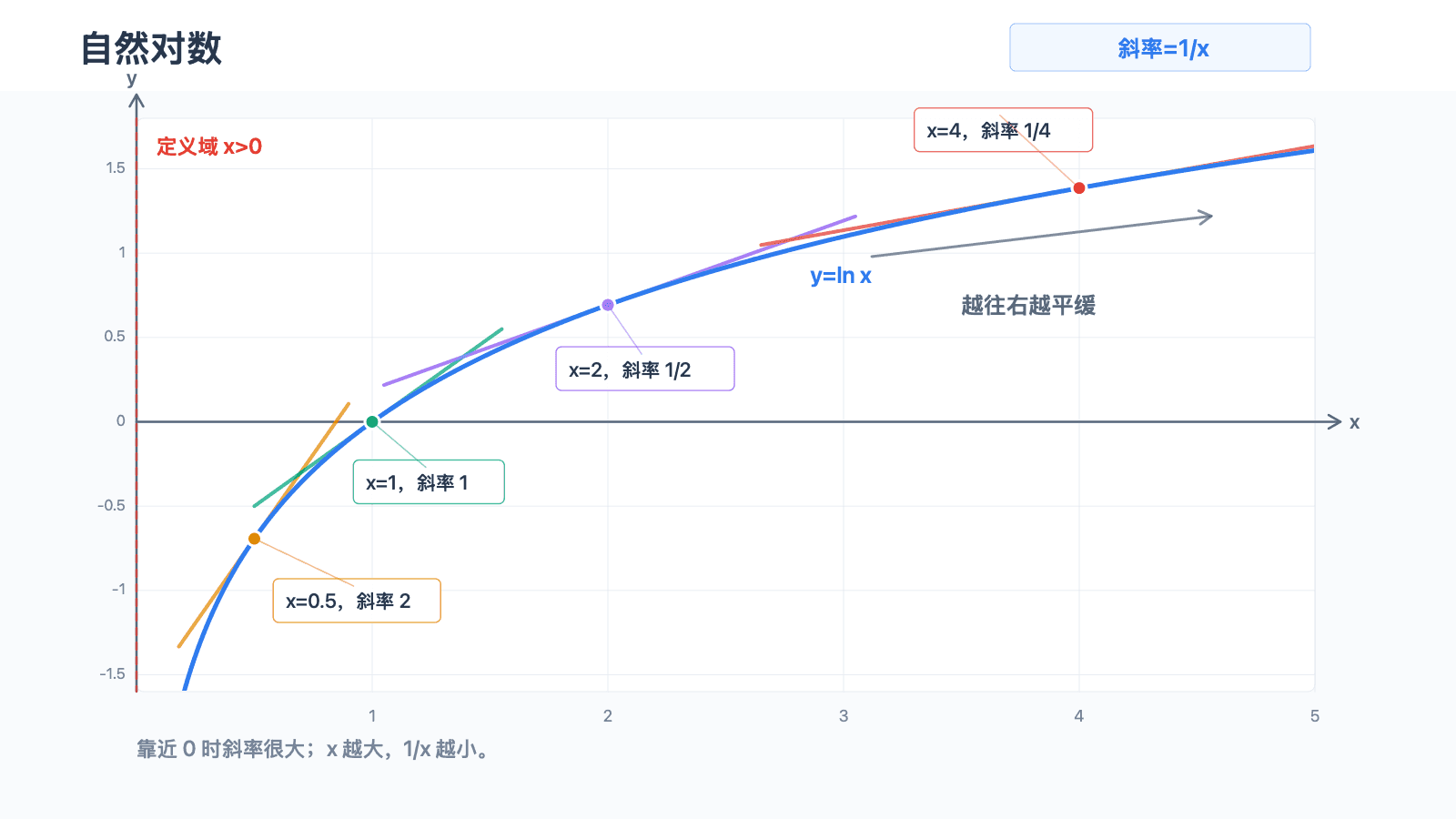
自然对数的斜率由 1/x 给出,输入越大,单位增加带来的对数变化越小。
一般底数的对数可以通过换底公式化成自然对数:
logax=lnalnx
所以
dxdlogax=xlna1
其中 a>0 且 a=1。
复合函数形式也很常见:
dxdlnu(x)=u(x)u′(x)
dxdlogau(x)=u(x)lnau′(x)
不要把 dxdln(3x) 误写成 3x1。链式法则给出 3x3=x1。对数求导里,分子上的内层导数经常会和分母的一部分相消。
例题:对数函数与链式法则
求函数
f(x)=ln(3x2+1)−log2x
在 x>0 上的导数。
第一项是自然对数复合函数,内层是 3x2+1,内层导数是 6x。因此
dxdln(3x2+1)=3x2+16x第二项是以 2 为底的对数函数。根据公式
dxdlog2x=xln21保留原式中的减号,得到
f′(x)=3x2+16x−xln21
对数求导的入门方法
有些函数看起来像幂函数,又像指数函数。例如 xx 中,底数和指数都含有变量。它不是 xn,也不是 ax,直接套基本公式会出错。
对数求导的想法是:先把函数记为 y,再对等式两边取自然对数。对数可以把乘积变成和,把商变成差,把幂的指数放下来。等式变得容易求导以后,再把 y 乘回去。
对数求导不是新规则的堆叠,而是先用对数性质改写结构,再回到链式法则、乘积法则和商法则。
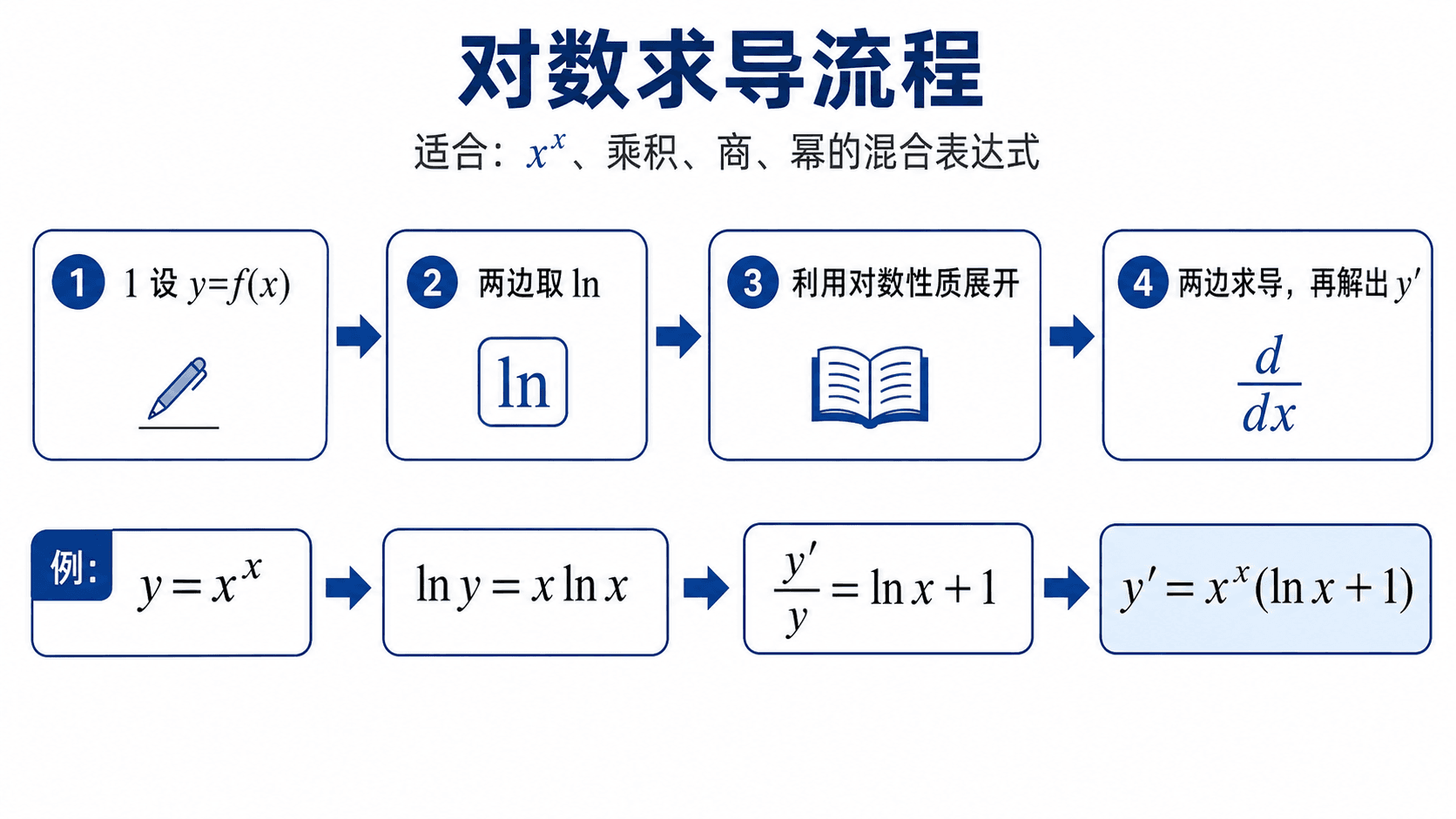
常用流程是:
设 y=f(x),并确认所讨论的区间内 y>0。入门阶段通常选择本身为正的表达式。
两边取自然对数,得到 lny=lnf(x)。
对 x 求导。左边要写成 yy′,右边按已经学过的规则求导。
两边乘以 y,最后把 y 换回原来的 f(x)。
例题:求 xx 的导数
在 x>0 上,求
y=xx
的导数。
两边取自然对数:
lny=ln(xx)用对数性质把指数放下来:
lny=xlnx对两边求导。左边用链式法则,右边用乘积法则:
yy′=lnx+1两边乘以 y,再把 y=xx 代回:
y′=xx(lnx+1)当表达式里同时出现“变量作底数”和“变量作指数”时,先想到对数求导。取对数以后,指数会降到前面,问题通常会变成乘积法则和链式法则的组合。
常见误区
三角、指数和对数导数的公式不算多,真正容易错的是条件和结构。
第一,三角函数默认用弧度。不要在微积分公式里混用角度制。
第二,cosx 的导数是 −sinx,负号不能丢。类似地,后面遇到 cotx、cscx 的导数时,也会出现负号。
第三,ax 的导数不是 xax−1。幂函数 xn 是“变量在底数,常数在指数”;指数函数 ax 是“常数在底数,变量在指数”。结构不同,规则不同。
第四,lnu(x) 的导数是 u(x)u′(x),不是简单的 u(x)1。只要里面不是单独的 x,就要检查内层导数。
第五,对数求导不是把两边取对数后忘记左边。若 lny 对 x 求导,结果是 yy′,不是 y1。
练习
- 求导:
f(x)=3sinx−2cosx+tanx
答案是
f′(x)=3cosx+2sinx+sec2x其中 −2cosx 的导数是 2sinx,负号要一起处理。
- 求导:
g(t)=5e−0.4t+2t
答案是
g′(t)=−2e−0.4t+2tln2第一项要用链式法则,第二项用 dtdat=atlna。
- 在 x>0 上求导:
h(x)=ln(3x2+1)−log2x
答案是
h′(x)=3x2+16x−xln21第一项来自 uu′,第二项来自换底公式。
- 一个物体的位移为
s(t)=0.05sin(10t)
其中 s 的单位是米,t 的单位是秒。求速度函数和最大速率。
速度函数是
v(t)=s′(t)=0.5cos(10t)因为 cos(10t) 的绝对值最大为 1,所以最大速率是 0.5 米/秒。
- 某数量模型为
N(t)=1200e0.03t
其中 t 以天计。求 N′(t),并求 t=10 时的瞬时增长率。
导数为
N′(t)=36e0.03t在 t=10 时,
N′(10)=36e0.3≈48.6也可以写成 N′(t)=0.03N(t),表示瞬时增长率等于当前数量的 3%。
- 用对数求导求
y=xsinx
在 x>0 上的导数。
两边取自然对数:
lny=sinxlnx求导得
yy′=cosxlnx+xsinx所以
y′=xsinx(cosxlnx+xsinx)
小结
三角函数导数描述周期运动中的相位变化:sinx 的导数是 cosx,cosx 的导数是 −sinx,tanx 的导数是 sec2x。指数函数导数描述按比例变化:ex 的导数仍是 ex,一般的 ax 会多出因子 lna。对数函数导数描述增长被压缩后的斜率:lnx 的导数是 x1,一般的 logax 是 xlna1。
这些公式进入应用题时,重点不是背得更多,而是看清函数结构。周期问题里注意相位和链式法则;增长衰减问题里分清相对增长率和瞬时增长率;变量同时出现在底数和指数时,用对数求导把结构拆开。