平面线性系统、相图与稳定性
上一章把一阶线性系统写成矩阵形式:
x′=Ax.
本章只看最先需要掌握的二维情形。令
x(t)=(x(t)y(t)),A=(acbd).
这时解不再是一条普通函数图像 y(t),而是平面中的一个运动点 (x(t),y(t))。随着时间变化,这个点画出的曲线叫轨线。把许多轨线和方向箭头放在同一个平面里,就得到相图。
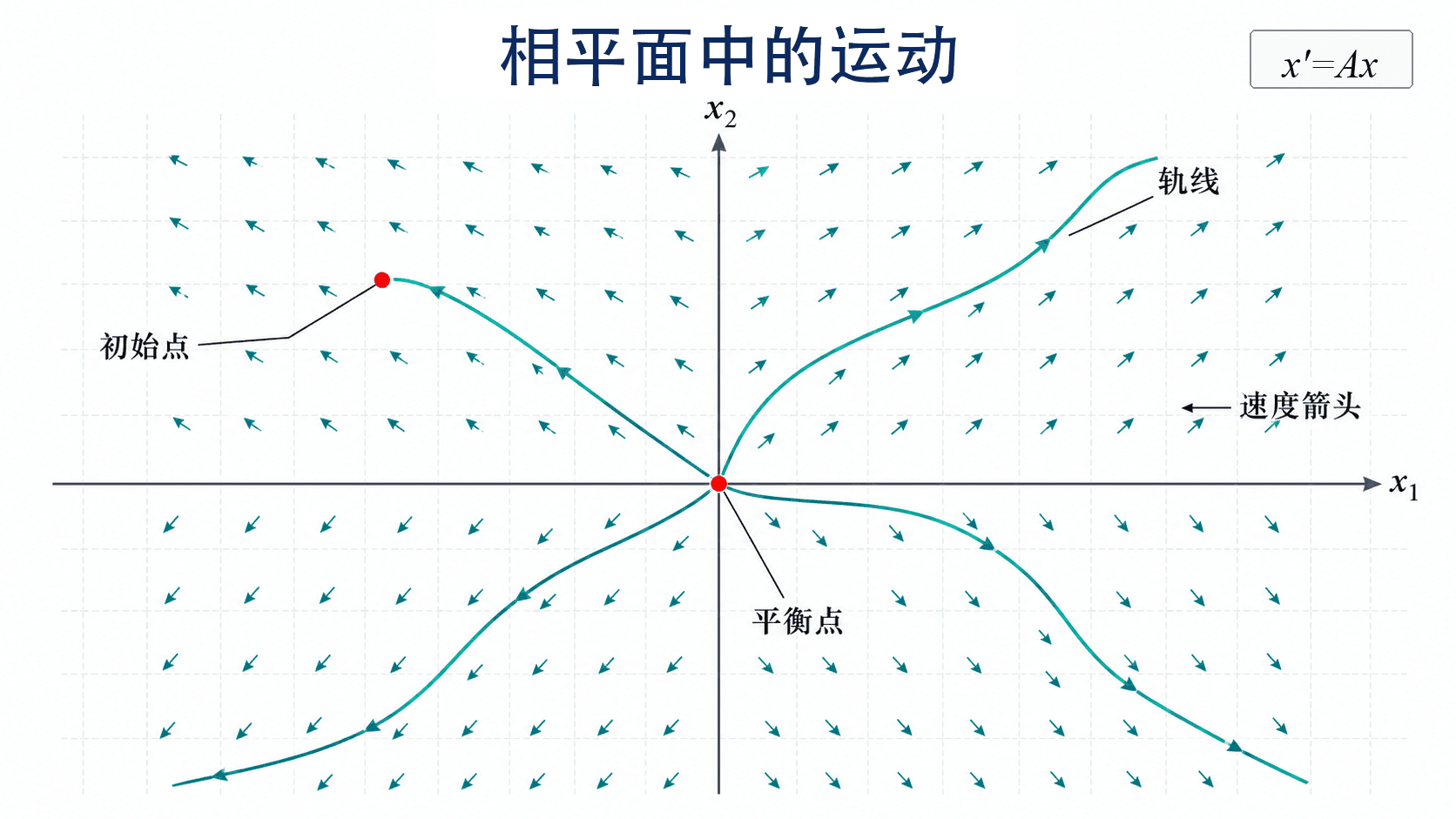
图:在线性系统中,每个点都有一个由 Ax 给出的速度箭头,轨线沿着这些箭头前进。
本章的核心问题是:特征值怎样决定相平面里的运动。你会看到,同一个矩阵的代数信息可以翻译成节点、鞍点、螺旋点、中心,以及稳定性结论。
从解曲线到相图
对二维系统
x′=Ax,
相平面中的每个点 x 都对应一个速度向量 Ax。如果某个解在时刻 t 经过点 x(t),那么它在那一刻的切向速度就是 Ax(t)。
所以相图有两层信息:第一层是向量场,告诉你每个点附近“往哪里走”;第二层是轨线,告诉你从某个初始点出发后会沿什么路径走。
相图不是 x 关于 t 的图像,也不是 y 关于 t 的图像。它把时间藏在运动方向里,只记录点 (x(t),y(t)) 在平面中走过的路径。
平衡点
平衡点是速度为零的点:
Ax=0.
若 detA=0,齐次系统只有一个平衡点,就是原点 0。若 detA=0,平衡点可能是一条直线,也可能仍然只有原点以外的退化行为需要单独分析。本章的主要分类先集中在 detA 的典型情形。
轨线不会随意交叉
只要系统右端满足存在唯一性条件,同一个初始点只能对应一条解。对线性系统来说,右端 Ax 很光滑,所以不同轨线不能在同一时刻穿过同一点后又分成两条未来。这个事实让相图可以被当作“交通图”来读:箭头给方向,轨线给道路。
实特征值带来的节点和鞍点
先看最容易从线性代数读懂的情形:A 有两个不同实特征值 λ1,λ2,对应特征向量 v1。通解可以写成
x(t)=c1eλ1tv
这条公式的几何意思很直接:系统中有两条特征方向。沿着特征方向出发,运动会一直留在这条直线上,只是按指数因子放大或缩小。
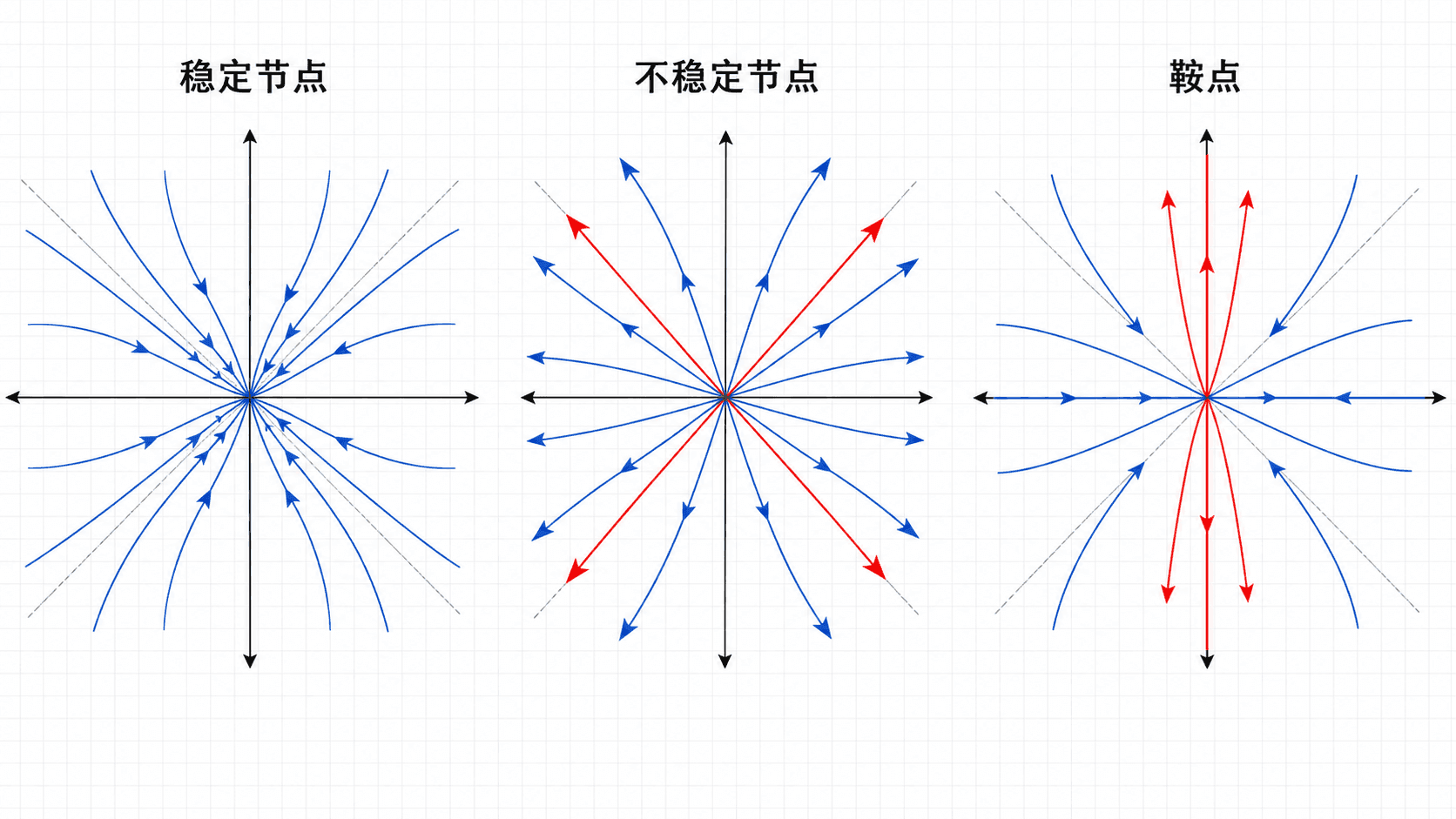
图:两个实特征值的符号决定轨线靠近原点、远离原点,还是一部分靠近一部分远离。
两个特征值都为负
若
λ1<0,λ2<0,
两个指数因子都会衰减到 0。不管初始点怎样组合这两个方向,解都会趋向原点。这叫稳定节点,也叫吸引节点。
若两个负特征值大小不同,长期靠近原点时,轨线通常会越来越贴近“衰减较慢”的特征方向。比如 e−t 比 e−4t 衰减慢,所以最后看起来更像 λ=−1 对应方向。
两个特征值都为正
若
λ1>0,λ2>0,
两个指数因子都会增长。除了恰好在原点的解,其余解会离开原点。这叫不稳定节点,也叫排斥节点。
特征值一正一负
若
λ1<0<λ2,
一个方向会把点拉向原点,另一个方向会把点推出原点。这叫鞍点。鞍点总是不稳定,因为只要初始条件带有一点点不稳定方向的分量,长期就会被指数放大。
鞍点里确实有“靠近原点”的轨线,但这不表示平衡点稳定。稳定性要求原点附近的所有足够小扰动都一直留在附近;鞍点的离开方向会破坏这个要求。
例题:从矩阵读出稳定节点
判断系统
x′=(−102−3
在原点附近的相图类型。
因为矩阵是上三角矩阵,特征值就是对角线上的数:
λ1=−1,λ2=
复特征值带来的旋转
若特征值是一对共轭复数
λ=α±iβ,β=0,
解中会出现正弦和余弦。这说明相平面里有旋转。实部 α 决定旋转时半径怎样变化:
eαt
是共同的包络因子。
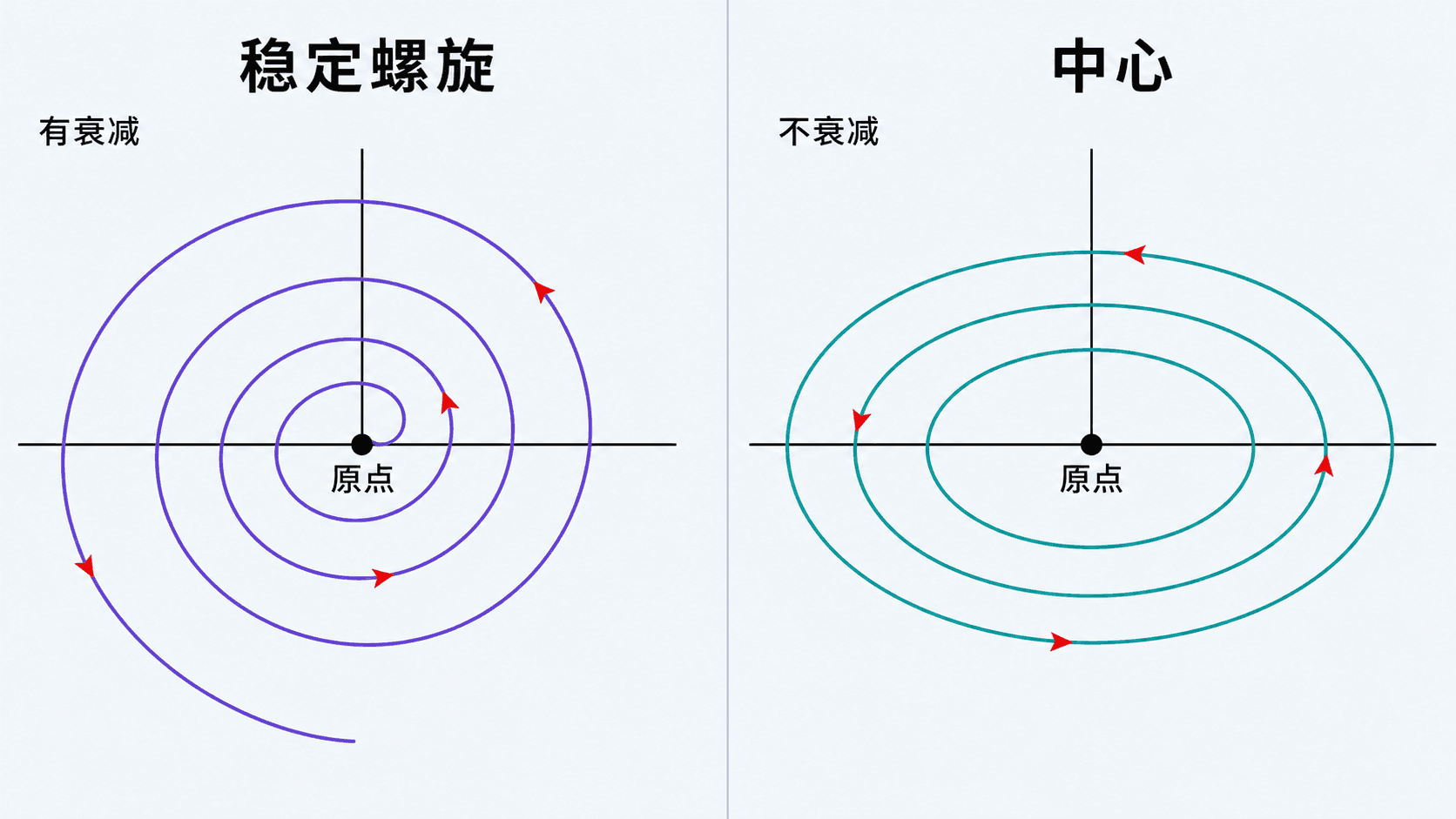
图:复特征值的虚部带来旋转,实部决定轨线向内收缩、向外扩张,还是保持封闭。
稳定螺旋和不稳定螺旋
若 α<0,包络 eαt 衰减,轨线一边旋转一边靠近原点。这叫稳定螺旋点。
若 α>0,包络增长,轨线一边旋转一边离开原点。这叫不稳定螺旋点。
旋转方向不能只从特征值看出来。一个实用方法是看点 (1,0) 处的速度向量。若速度大致向上,轨线从右侧往上走,旋转方向就是逆时针;若速度大致向下,就是顺时针。
中心
若 α=0,特征值是纯虚数:
λ=±iβ.
这时没有指数衰减,也没有指数增长。典型轨线是围绕原点的闭合曲线,原点叫中心。
中心是稳定的,但不是渐近稳定的。靠近中心的解会一直绕着转,不会跑远;可是它也不会趋向原点。
阻尼振子的相平面
二阶振动方程
mu′′+γu′+ku=0
可以改写成一阶系统。令 x=u,y=u′,则
(xy)′
这里 x 是位移,y 是速度。矩阵的迹和行列式为
T=−mγ,D=mk.
若没有阻尼,γ=0,相图是中心,表示能量在位移和速度之间来回交换。若有阻尼,γ>0,迹变成负数,系统会趋向平衡。阻尼较小时是稳定螺旋,阻尼很大时会变成稳定节点。
迹和行列式给出分类地图
对二维矩阵
A=(acbd),
两个最有用的标量是迹和行列式:
T=tr(A)=a+d,D=det(A)=ad−bc.
特征方程可以写成
λ2−Tλ+D=0.
因此特征值的和是 T,乘积是 D。判别式
Δ=T2−4D
决定特征值是实数还是复数。
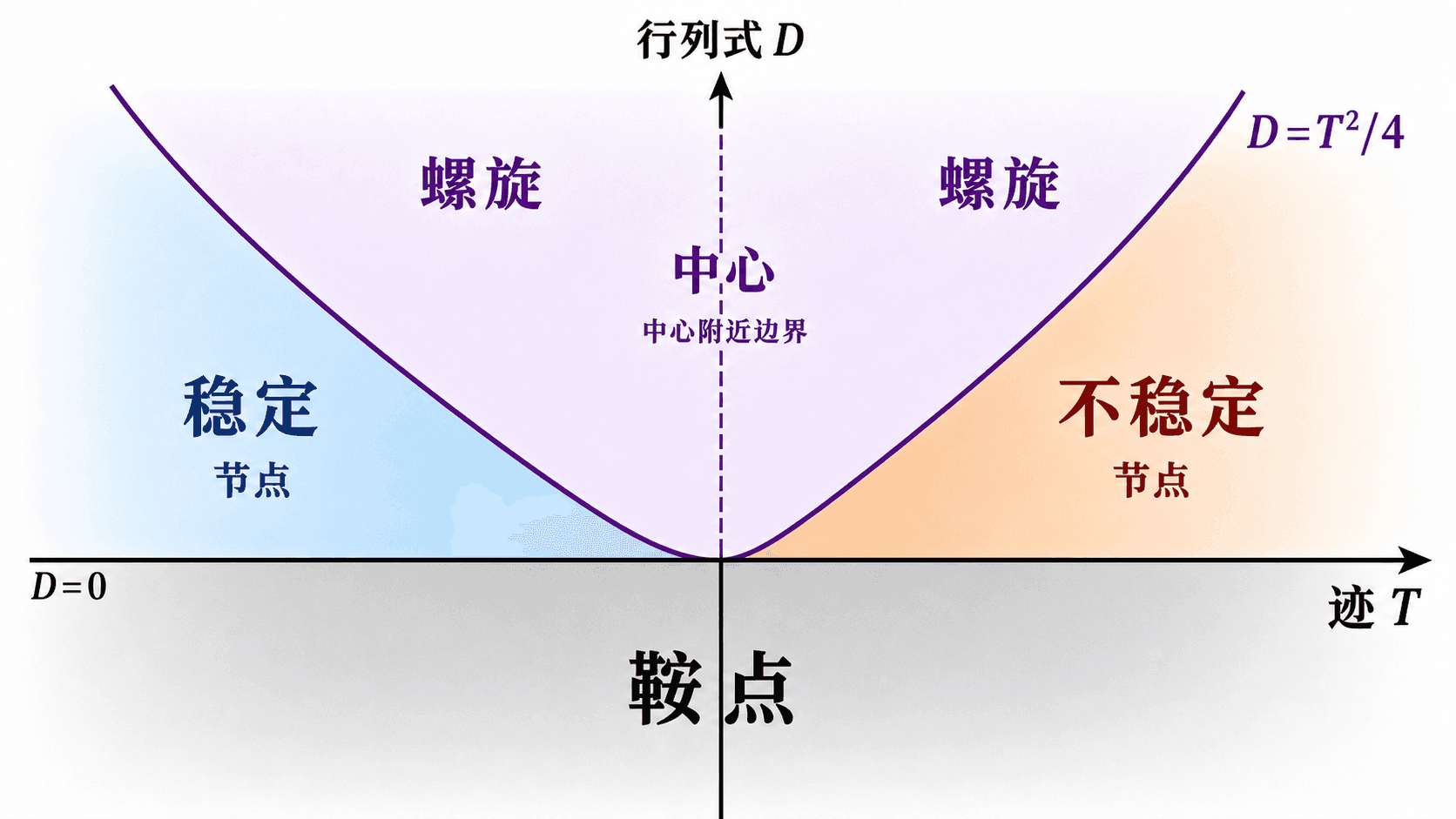
图:迹 T 控制整体增长或衰减,行列式 D 和判别式 Δ 控制节点、鞍点、螺旋和中心。
分类表
边界情形也要认识,但不要把它们和典型区域混在一起。D=0 表示有零特征值,平衡点可能不孤立;Δ=0 表示重特征值,可能是星形节点,也可能是退化节点;T=0,D>0 且 Δ< 才是中心。
只看行列式正负不够。D>0 只说明两个特征值同号,或是一对共轭复数;稳定还是不稳定,还要看迹 T 的符号。
快速判断例题
设
A=(12−4−3).
先算
T=1+(−3)=−2,D=1⋅(−3)−(−4)⋅
判别式为
Δ=T2−4D=4−20=−16.
因为 D>0、Δ<0、T<0,特征值是一对实部为负的复数,所以原点是稳定螺旋点。这里不需要先完整求出特征向量;迹和行列式已经给出了相图类型和稳定性。
稳定、渐近稳定和不稳定
稳定性描述的是平衡点附近的解对扰动的反应。对齐次线性系统来说,讨论的平衡点通常是原点。
稳定
如果初始点足够靠近原点,那么之后的整条轨线都能留在原点附近,就说原点稳定。中心就是典型例子:小圆附近的轨线一直绕着转,不会跑远。
渐近稳定
如果原点稳定,并且附近的解还会满足
t→∞limx(t)=0,
就说原点渐近稳定。稳定节点和稳定螺旋都是渐近稳定。
不稳定
如果无论把初始点放得多靠近原点,都能找到某些解最终离开指定小邻域,就说原点不稳定。鞍点、不稳定节点和不稳定螺旋都属于这一类。
对二维线性系统,最常用的稳定性判据可以压缩成一句话:
若所有特征值的实部都小于 0,原点渐近稳定;若至少有一个特征值的实部大于 0,原点不稳定;若特征值在虚轴上,通常需要单独检查边界情形。
在本章的典型分类里,边界情形最常见的是中心。它稳定但不渐近稳定。这个区别在物理模型里很自然:无阻尼振子不会爆炸,但也不会自己停在平衡位置。
非齐次系统的平衡点平移
现在看非齐次线性系统:
x′=Ax+b.
平衡点不一定在原点,而是满足
Ax∗+b=0.
若 A 可逆,则平衡点唯一,并且
x∗=−A−1b.
令
y=x−x∗.
因为 x∗ 是常向量,所以 y′=x′。代入非齐次系统:
y′=A(y+x∗)+b=
所以非齐次系统的相图,就是齐次系统 y′=Ay 的相图平移到新平衡点 x∗ 附近。
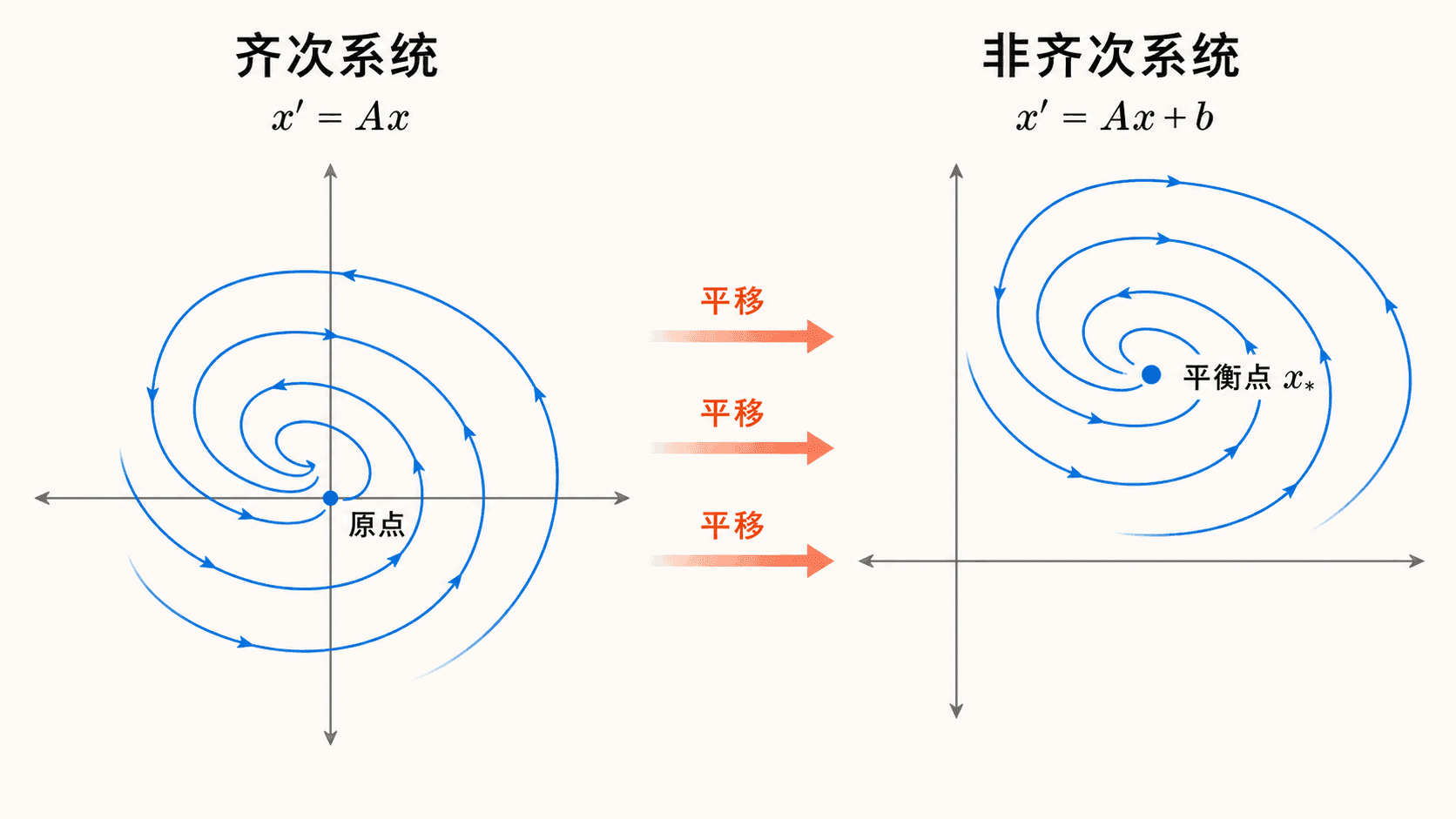
图:当 A 可逆时,x′=Ax+b 的轨线形状由 A 决定,b 改变平衡点位置。
例题:先找平衡点,再判断类型
考虑
x′=(−2−1
先求平衡点。设 x∗=(x∗,y,解
处理非齐次系统时,不要默认原点是平衡点。先代入 x=0 检查:若 b=0,原点处速度就是 b,当然不会静止。
一套读相图的流程
面对一个平面线性系统,建议按固定顺序读,不要一上来凭图像猜类型。
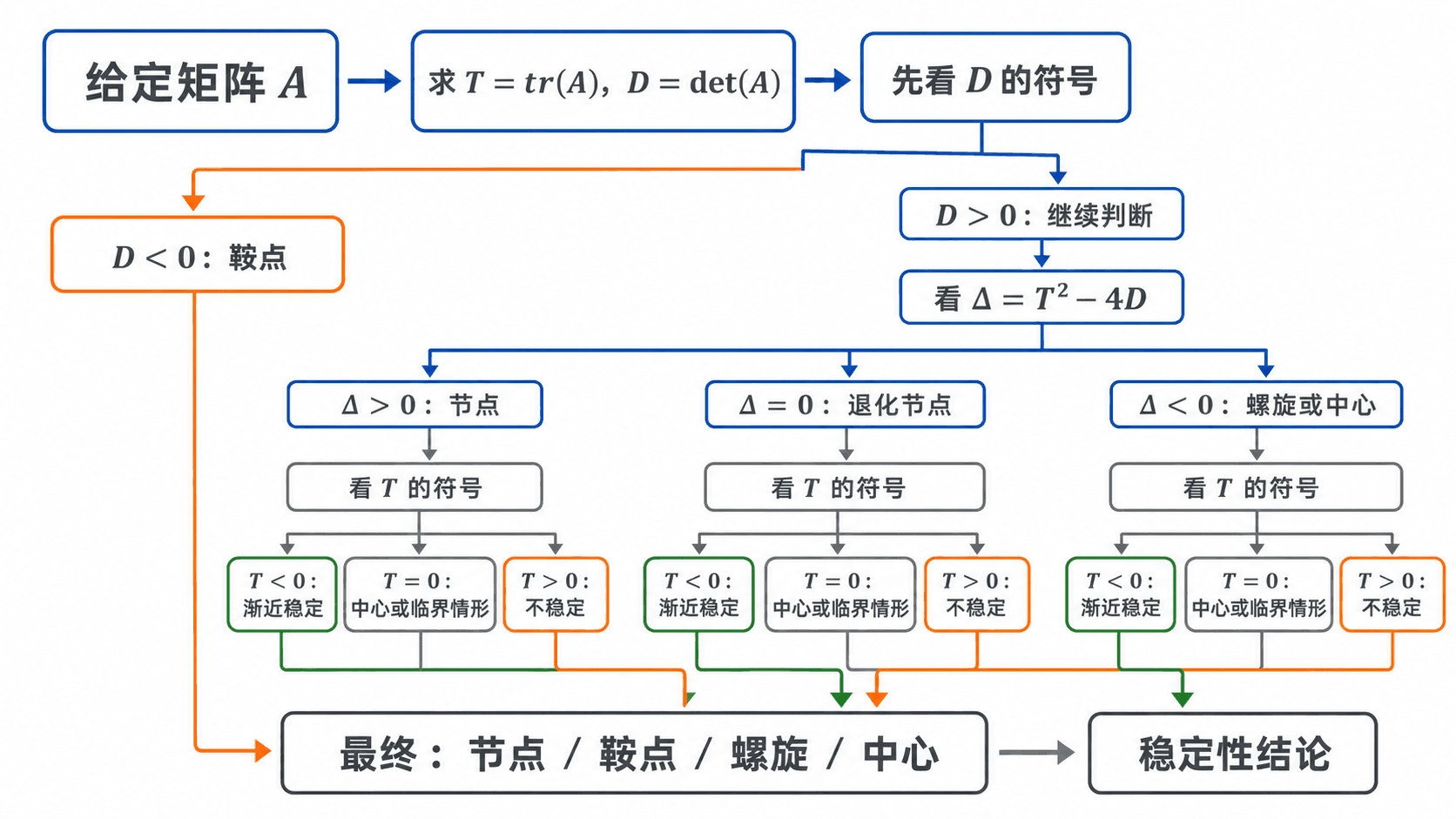
图:先算迹、行列式和判别式,再把代数信息翻译成相图类型和稳定性。
先确认系统是齐次还是非齐次。齐次系统 x′=Ax 的典型平衡点是原点;非齐次系统 x′= 要先解 。
常见误区
把中心说成渐近稳定
中心附近的解不会离开平衡点很远,所以它稳定;但它不会趋向平衡点,所以不是渐近稳定。很多物理模型里的“永远振荡”都属于这种情况。
只看特征值符号,不看实部
复特征值没有“正负”之说。要看的是实部 α。若 α<0,螺旋向内;若 α>0,螺旋向外;若 α=0,进入中心情形。
忘记非齐次系统的平衡点
对 x′=Ax+b,平衡点要解 Ax∗+b=0。只有 时,原点才自动是平衡点。
把重特征值当成一种固定图形
当 Δ=0 时,两个特征值相同。若有两个独立特征向量,可能是星形节点;若只有一个特征方向,轨线会有退化节点的弯曲形状。稳定性仍由特征值实部控制,但相图形状要更小心。
本章的分类不是背图形,而是在做翻译:矩阵 A 的特征值决定增长、衰减和旋转;特征向量决定实特征值情形下的关键方向;非齐次项负责移动平衡点。
练习
练习一
判断系统
x′=(200−1
的相图类型和稳定性。
特征值是 2 和 −1,一正一负,所以原点是鞍点。鞍点不稳定。x 轴方向对应增长,y 轴方向对应衰减。
练习二
设
A=(0−41−2).
不用求特征向量,判断原点的类型和稳定性。
有
T=−2,D=4,Δ=T2−4D=4−练习三
非齐次系统
x′=(−10
的平衡点在哪里?它是什么类型?
平衡点满足
−x+3=0,−2y−4=0.所以
x练习四
某二维线性系统的迹和行列式为
T=0,D=9.
若它的判别式为负,原点是什么类型?它是否渐近稳定?
因为
Δ=T2−4D=−36<0,特征值是一对复数。又因为 T=0,复特征值的实部为 ,所以原点是中心。中心稳定,但不渐近稳定。