线性代数研究什么:方程、向量与变换
线性代数研究的不是一堆孤立的矩阵规则,而是多变量问题里最基本的一类结构:几个量怎样同时满足条件,几个方向怎样合成目标,一个规则怎样把所有向量一起移动。
这一章先不追求计算技巧的数量。我们只抓住一件事:同一个线性问题可以有三种看法。它可以是方程组,可以是向量组合,也可以是矩阵给出的线性变换。后面整门课会反复在这三种看法之间切换。
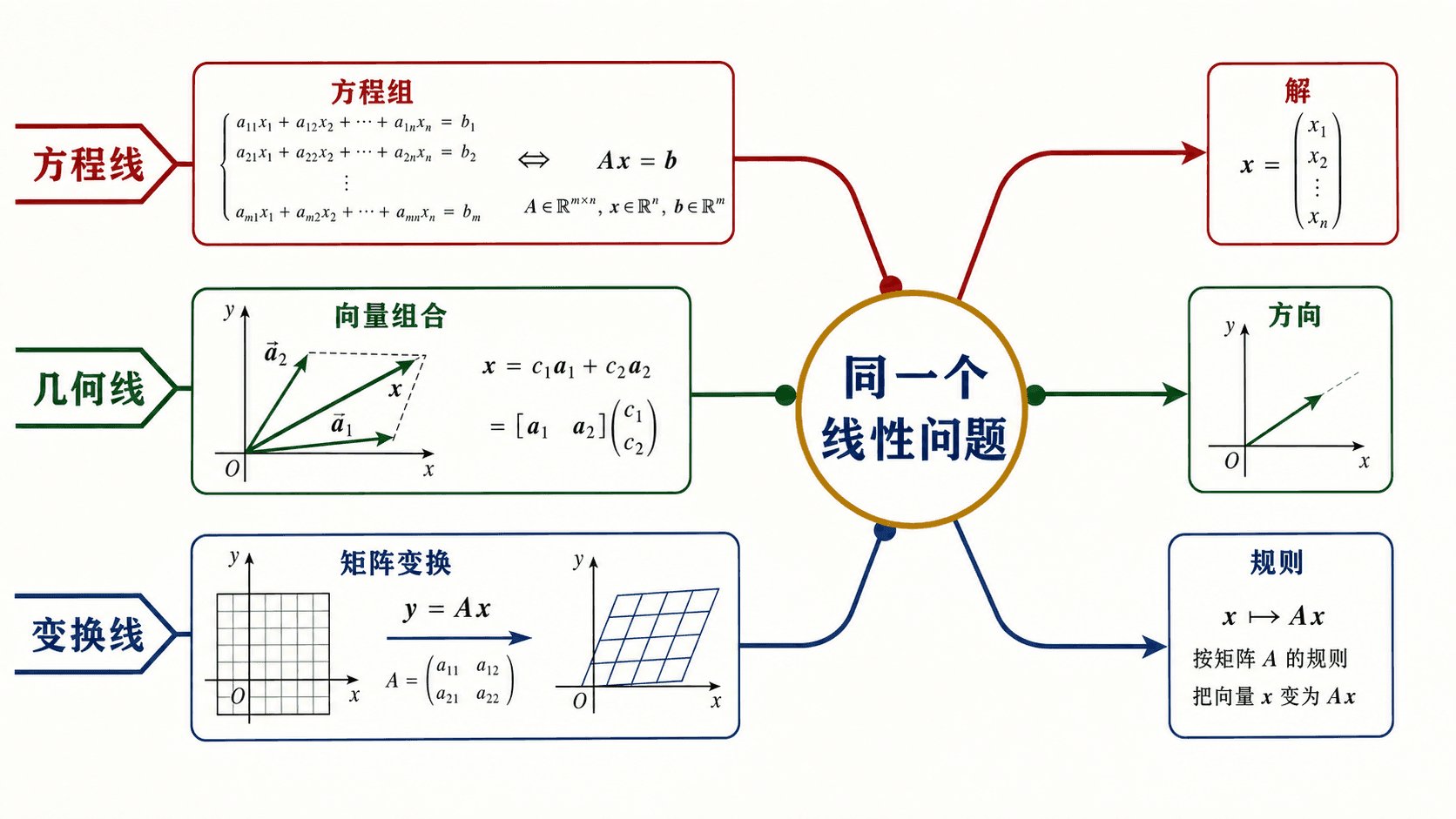
方程组、向量组合与矩阵变换从解、方向、规则三条主线汇合到同一个线性问题。
先认识“线性”
一个表达式是线性的,意思是未知数只以一次的形式出现,并且未知数之间不相乘、不开方、不放进三角函数或指数函数。
下面是线性表达式:
2x+3y−z
下面不是线性表达式:
x2+y,xy+1,sinx+y
在线性方程中,我们把线性表达式等于一个常数。例如:
2x+y=5
如果有几个线性方程要同时满足,就得到线性方程组:
{2x+y=5x−y=1
线性代数中的“线性”先从形状上看:未知数只出现一次,系数乘未知数,再相加。它的深层含义会在矩阵变换里出现:直线仍然变成直线,原点仍然留在原点,组合关系被保留下来。
表达式、方程和系统
这三个词常被混在一起,但它们说的是不同层次。
线性表达式是一个算式,例如 2x+y。线性方程是在表达式之间加上等号,例如 2x+y=5。线性系统是多个线性方程放在一起,要求同一组未知数同时满足它们。
用一句话说:表达式给出一个量,方程给出一个条件,系统给出一组条件。
不要把“线性”理解成“图像一定是一条二维直线”。二元一次方程在平面中是一条直线;三元一次方程在三维空间中是一个平面;更多未知数时,我们仍然用同一套代数语言描述它,只是图像不再容易直接画出来。
从两个未知数开始
考虑这个方程组:
{2x+y=5x−y=1
它的答案是 x=2, y=1。这件事可以有三种解释。
行图像:两条直线的交点
第一个方程 2x+y=5 在坐标平面中是一条直线。第二个方程 x−y=1 也是一条直线。一个解必须同时在两条直线上,所以解就是两条直线的交点。
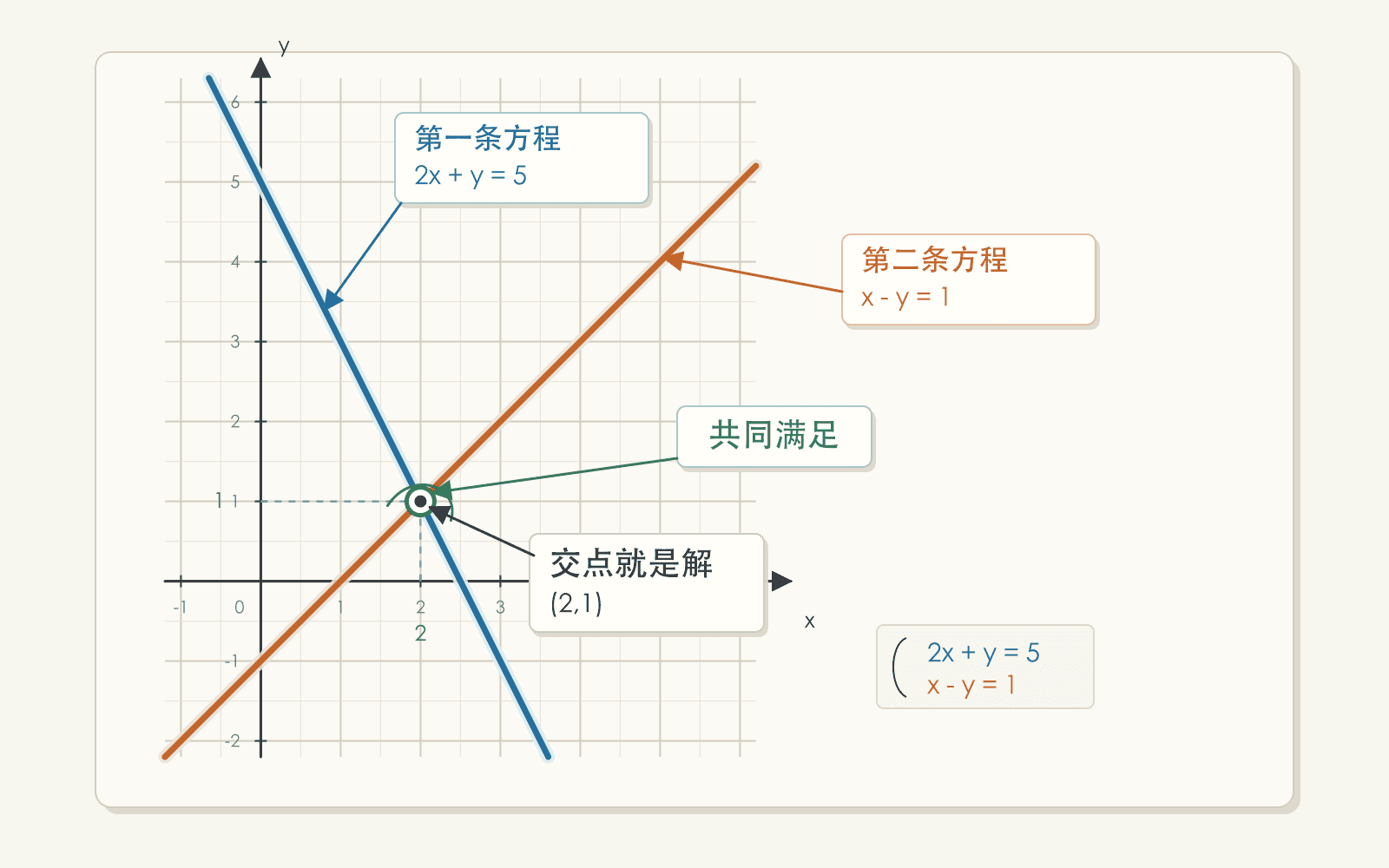
二元线性方程组的行图像:两条直线的交点就是共同满足两个方程的解。
列图像:用列向量拼出右端
把同一个方程组按未知数分组:
x[21]+y[1−1]=[51]
这句话的意思是:取第一列向量 [21] 的 x 倍,再加上第二列向量 [1−1] 的 y 倍,能不能得到右端向量 [51]。
当 x=2, y=1 时:
2[21]+1[1−1]=[51]
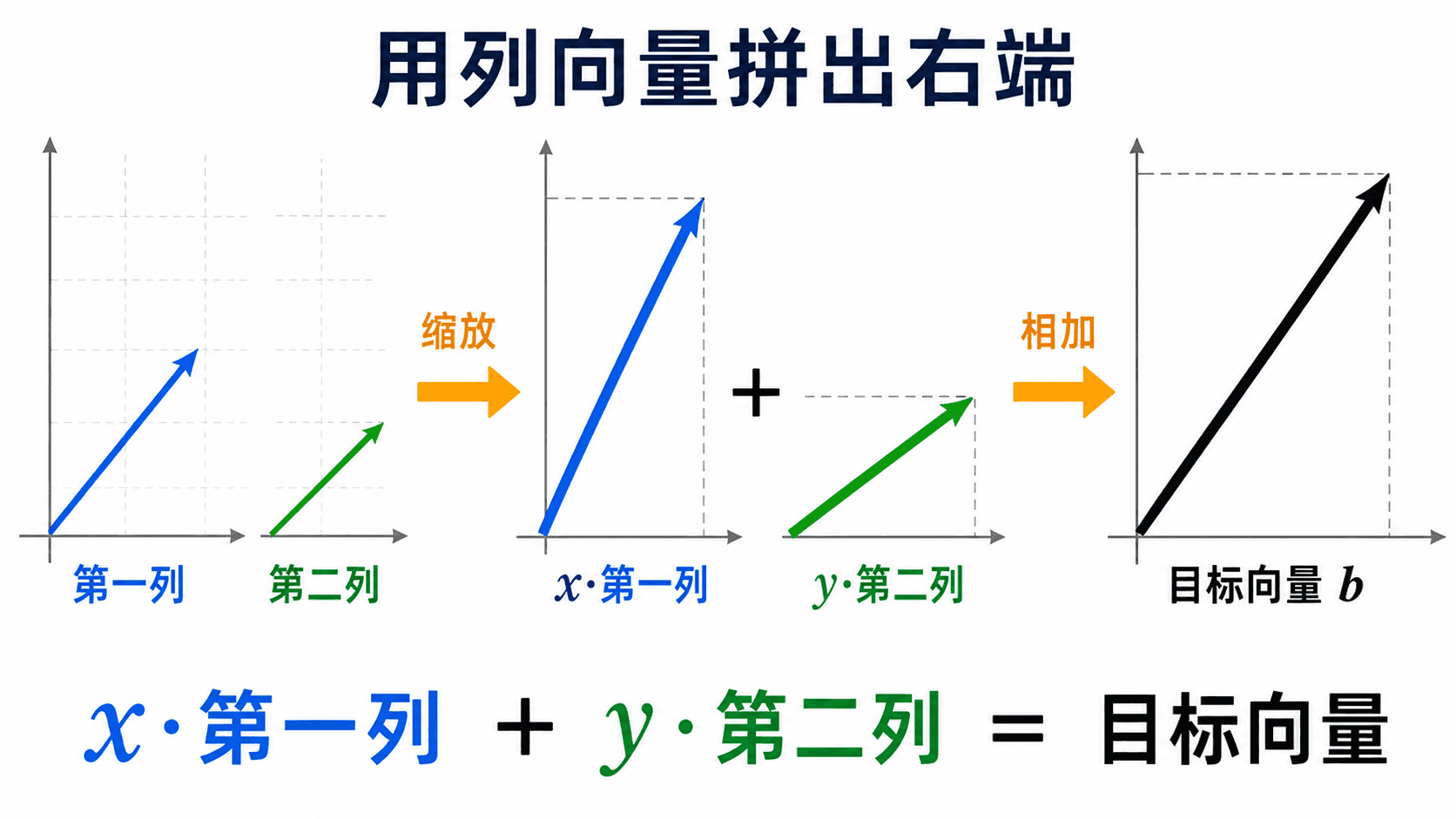
列向量组合:x·第一列 + y·第二列 = 目标向量。
矩阵方程:把系统压缩成一行
把系数排成矩阵,把未知数排成向量,把右端常数也排成向量:
A=[211−1],x=[xy],b=[51]
原来的方程组就写成:
Ax=b
这一行不是把细节藏起来,而是把结构显出来:矩阵 A 记录所有系数,未知向量 x 记录要找的数,右端向量 b 记录目标。
例题:把同一个系统翻译三遍
题目:对方程组
{2x+y=5x−y=1
分别写出它的解、列向量组合形式和矩阵方程形式。
先从第二个方程得到 y=x−1,再代入第一个方程,得到 2x+x−1=5,所以 3x=6,从而 x=2。
把 x=2 代回 y=x−1,得到 y=1。所以方程组的解是 (2,1)。
按未知数分组,得到列向量组合:
x[21]+y[1−1]=[51]把系数放入矩阵,得到矩阵方程:
[211−1][xy]=[51]这三个写法描述的是同一个问题。
三个未知数时发生了什么
二元方程组能画成两条直线。三元方程组的每个方程通常对应三维空间中的一个平面。
看这个系统:
⎩⎨⎧x+y+z=6x+2y+z=82x+y+3z=13
它的共同解是:
(x,y,z)=(1,2,3)
几何上,这表示三个平面在同一个点相交。代数上,这表示同一组三个数同时满足三个条件。列向量上,这表示三个列向量按 1,2,3 的比例组合后,正好得到右端向量。
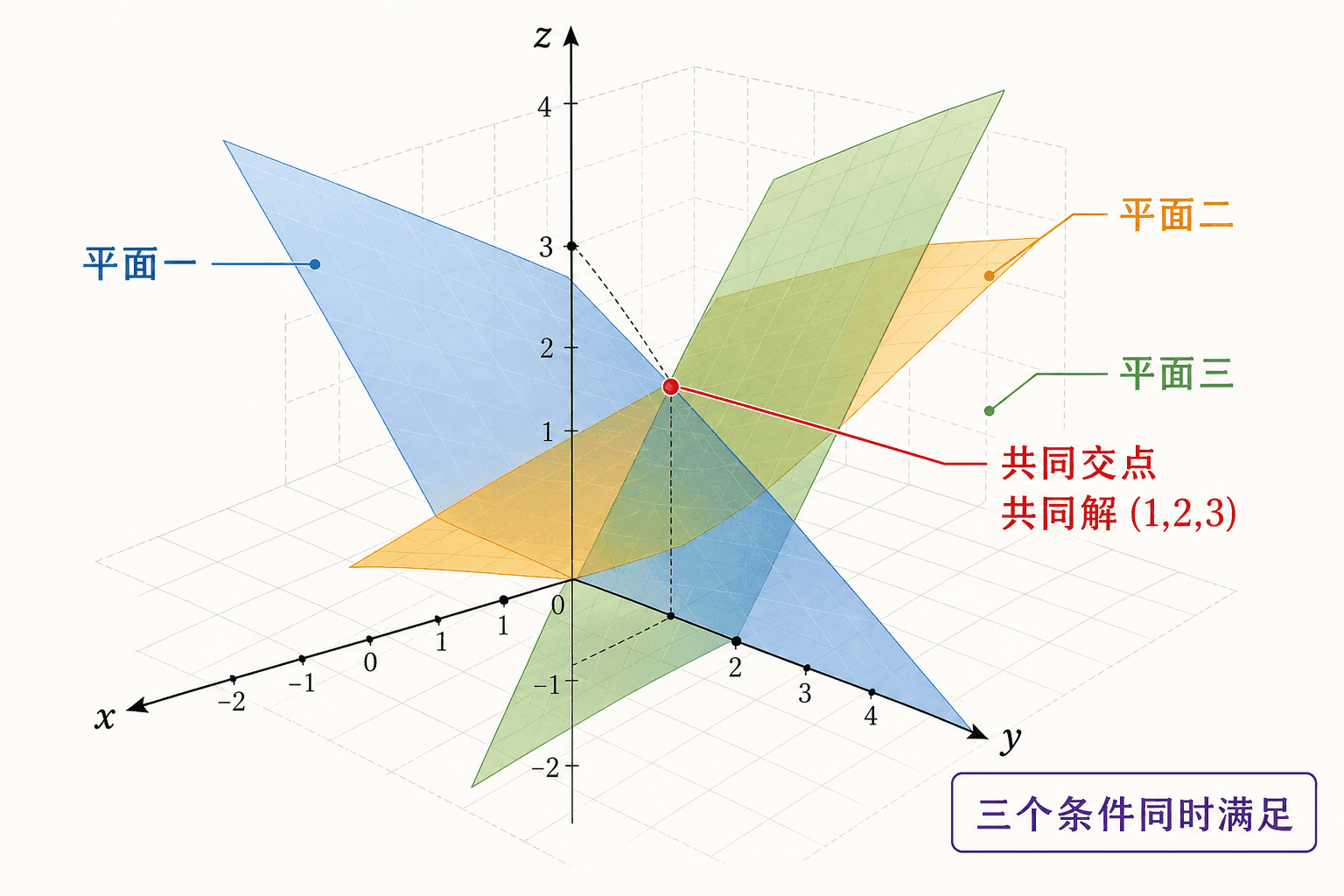
三元线性方程组的三个平面交于一点,表示三个条件同时满足。
例题:用消去看共同解
题目:求解方程组
⎩⎨⎧x+y+z=6x+2y+z=82x+y+3z=13
用第二个方程减去第一个方程,得到 y=2。这一步把两个条件的差别单独拿出来看。
把 y=2 代入第一个方程,得到 x+z=4。这说明 x 和 z 还要一起满足一个条件。
把 y=2 代入第三个方程,得到 2x+3z=11。
由 x+z=4 得到 x=4−z,代入 2x+3z=11,得到 2(4−z)+3z=11,所以 z=3,再得到 x=1。
因此共同解是 (1,2,3)。它不是只满足其中一个平面,而是同时落在三个平面上。
方程组的解可以理解为“所有条件的共同位置”。二元时常见的是直线交点,三元时常见的是平面交点;更高维时仍然是共同位置,只是我们更多依靠代数和矩阵语言来处理。
矩阵、向量与线性变换
矩阵不只是系数表。它还可以看成一个规则:输入一个向量,输出另一个向量。
例如:
A=[211−1]
给定输入向量 v=[xy],矩阵会输出:
Av=[211−1][xy]=[2x+yx−y]
这正好就是前面方程组左边的两个表达式。于是 Ax=b 可以读成:有没有一个输入向量 x,经过矩阵 A 的规则后,变成目标向量 b?
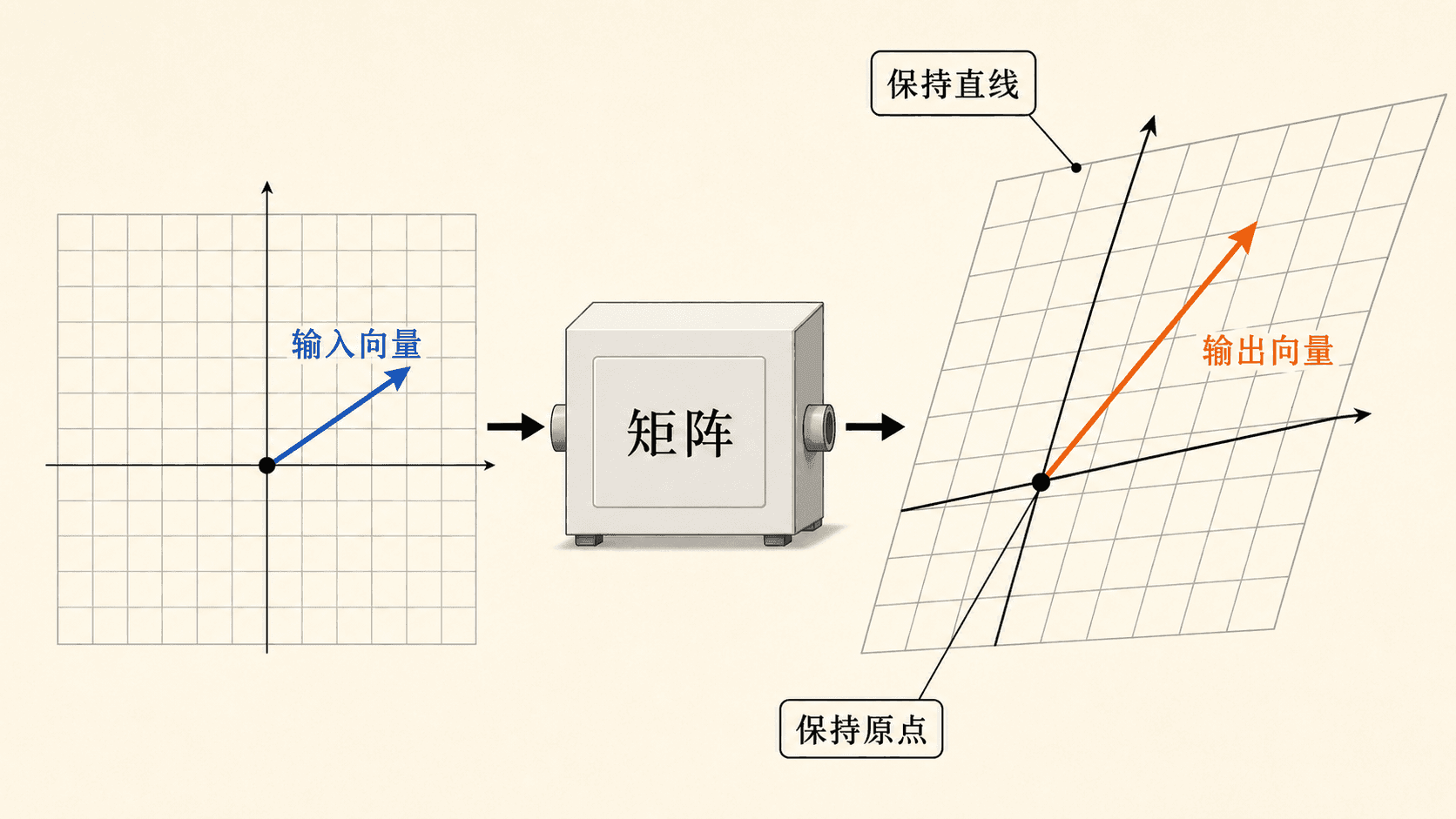
矩阵可以看作一台线性变换机器,把输入向量映射为输出向量,并保持直线与原点。
基向量的去向决定矩阵
二维空间里有两根最基本的方向:
e1=[10],e2=[01]
矩阵 A 会把它们送到:
Ae1=[21],Ae2=[1−1]
这两个输出正是矩阵的两列。知道两根基向量被送到哪里,就知道所有向量会被送到哪里,因为任意输入向量都可以写成:
v=xe1+ye2
线性变换会保留这种组合:
Av=A(xe1+ye2)=xAe1+yAe2
线性与非线性的边界
线性变换有两个基本特征:
T(u+v)=T(u)+T(v)
T(cv)=cT(v)
第一条说“先相加再变换”和“先变换再相加”结果相同。第二条说“先缩放再变换”和“先变换再缩放”结果相同。它们合起来说明:线性变换尊重向量组合。
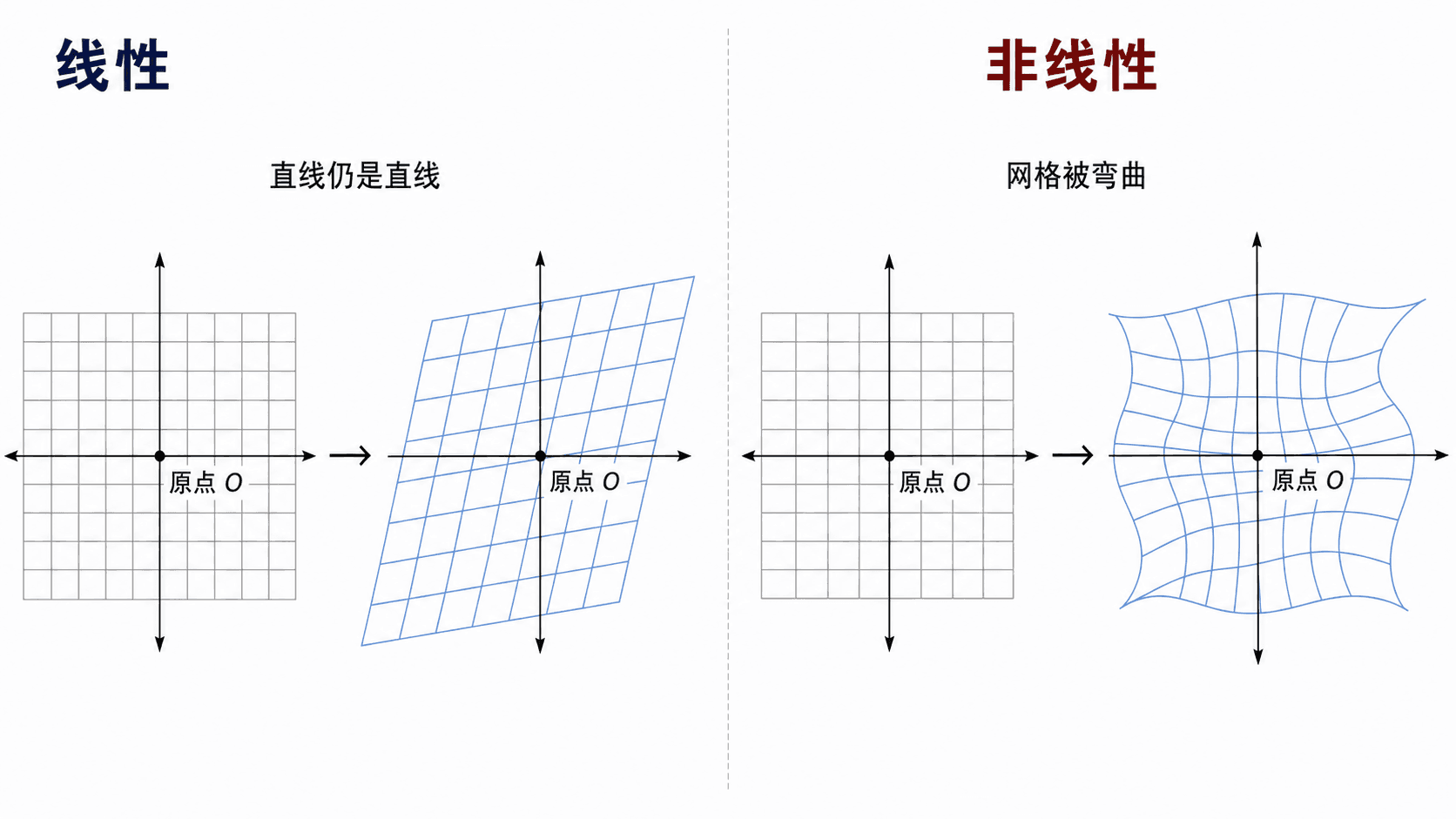
线性变换保持直线为直线,非线性变换使网格被弯曲。
并不是所有“看起来有规则”的变换都是线性的。平移会把原点移走,所以不是线性变换;平方会弯曲网格,也不是线性变换。线性代数先研究这类保留组合关系的规则,再用它们近似或分解更复杂的问题。
三种视角怎样互相翻译
现在把前面的内容放在一张语言对照表里。你不需要立刻熟练使用所有词,只要知道它们是在说同一件事。
一个系统的三种读法
还是这个矩阵方程:
[211−1][xy]=[51]
按方程组读,它是在问两条直线在哪里相交。按向量组合读,它是在问用两根列向量能不能拼出右端向量。按线性变换读,它是在问哪个输入向量会被矩阵送到目标位置。
这三个问题的答案是同一个:
[xy]=[21]
线性代数为什么有用
许多真实问题不是一开始就长得像矩阵。它们往往先表现为一组关系:某路口车流守恒,某张图像可以分成像素块,某组数据要拟合一条趋势,某个产业部门的产出依赖其他部门的投入。
当这些关系可以近似写成“系数乘变量再相加”时,线性代数就可以进入问题。
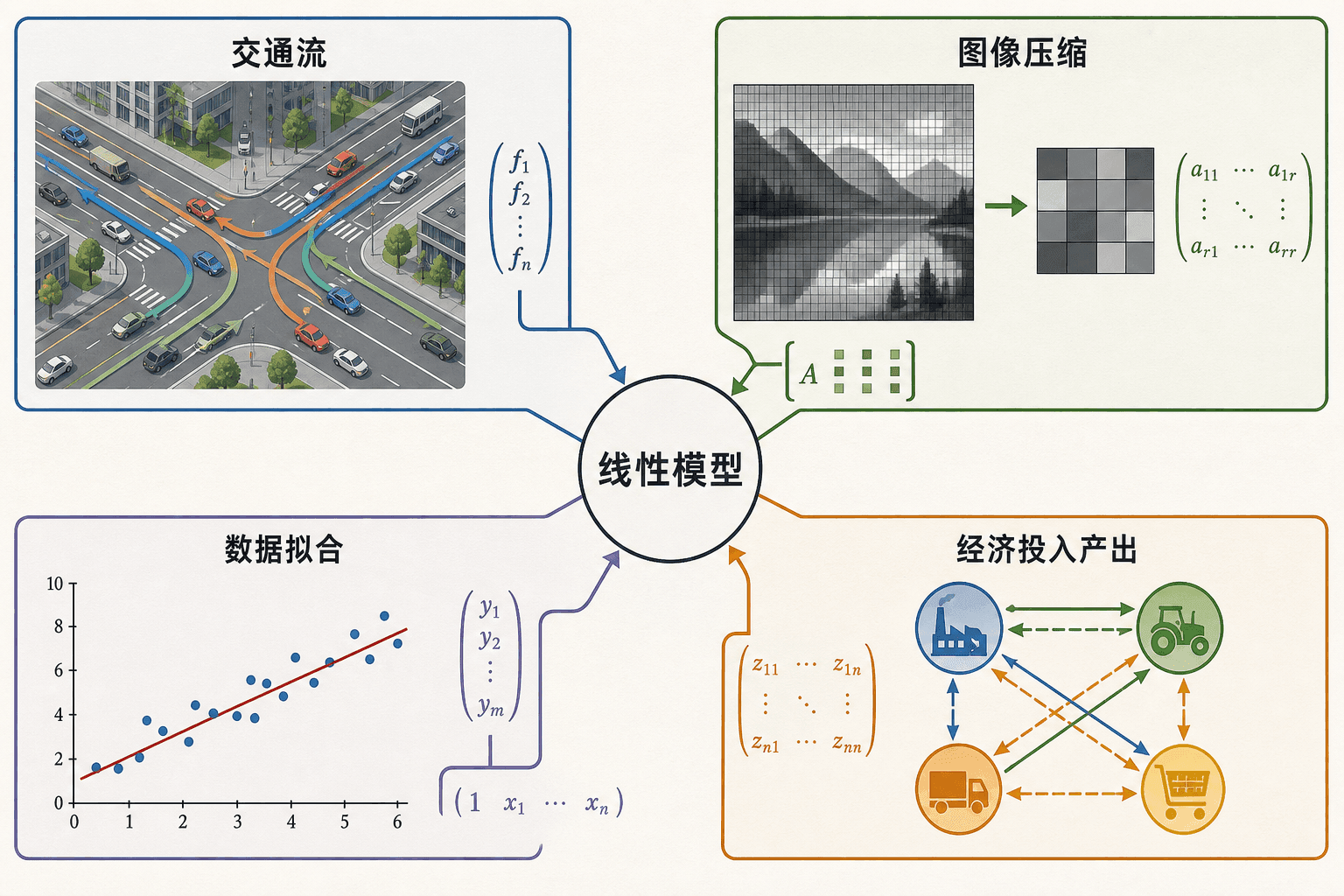
真实应用拼图展示线性模型在交通流、图像压缩、数据拟合和经济投入产出中的作用。
几个典型入口
交通流问题常把每条路的车流量看成未知数,路口的“流入等于流出”给出线性方程。图像处理把像素排成向量或矩阵,压缩和降噪常用矩阵分解。数据拟合把误差最小的问题变成投影问题。经济投入产出模型用矩阵描述行业之间的依赖关系。
这些例子不会在本章展开计算。现在要记住的是:线性代数提供的是一种翻译方式。它把多个变量之间的关系翻译成向量、矩阵和变换,然后用统一的方法研究解、方向和结构。
本课程后面会不断回到这一章的三句话:方程组关注“满足哪些条件”,向量组合关注“能拼出哪些目标”,线性变换关注“规则怎样移动空间”。只要这三句话在脑中连着,许多矩阵公式就不会显得孤立。
练习
练习一:判断是否线性
判断下面哪些是线性表达式。
3x−2y+7z,x2+y,4x−y,xy+z
线性表达式是 3x−2y+7z 和 4x−y。x2+y 中有平方项,xy+z 中有未知数相乘,所以它们不是线性的。
练习二:从方程组到矩阵方程
把下面的方程组写成 Ax=b。
{x+3y=72x−y=0
系数矩阵、未知向量和右端向量分别是:
A=[123−1],x=[xy],b=[70]所以矩阵方程是:
[123−1][xy]=[70]练习三:解释列向量组合
解释下面等式的含义,并找出它对应的方程组。
x[12]+y[3−1]=[70]
这个等式表示:用第一列向量的 x 倍加上第二列向量的 y 倍,得到右端向量。按分量展开,得到方程组:
{x+3y=72x−y=0练习四:读出基向量的去向
设
A=[0123]
求 Ae1 和 Ae2,并说明它们和矩阵的列有什么关系。
因为 e1=[10],所以 Ae1 取出矩阵第一列:
Ae1=[01]因为 e2=[01],所以 Ae2 取出矩阵第二列:
Ae2=[23]矩阵的每一列就是对应基向量经过这个矩阵后的新位置。
练习五:三种视角说同一句话
对矩阵方程
[1002][xy]=[34]
分别用方程组、向量组合和线性变换三种语言解释它。
方程组语言:它表示 x=3 和 2y=4 要同时成立,所以解是 x=3, y=2。
向量组合语言:它表示用 x 个 [10] 和 y 个 [02] 拼出 [34]。
线性变换语言:矩阵保持第一坐标不变,把第二坐标放大为原来的 2 倍;我们要找哪个输入向量会被送到 [34],答案是 [32]。
小结
本章只建立一张地图。线性方程组给出条件,向量组合给出拼法,矩阵变换给出规则。三者不是三套互不相关的知识,而是同一件事的三种读法。
下一章会从向量开始,把“加法、数乘、线性组合、张成”讲清楚。那时你会更具体地看到:列向量到底能拼出哪些目标,不能拼出哪些目标。