振动理论
振动是自然界中最普遍的运动形式之一:钟摆的摆动、弦的振动、分子的热运动,乃至地球的地震波,都可以用振动理论来描述。当一个力学系统在稳定平衡位置附近做微小运动时,不论势能函数的具体形式如何,运动方程总可以近似为线性方程——这就是小振动近似的核心思想。通过引入简正坐标,多自由度耦合系统可以分解为若干个独立的简谐振子,从而得到完整的解析描述。
小振动问题的建立
考虑一个具有 n 个自由度的保守系统,广义坐标为 q1,q2,…,qn。设系统在 qi=qi(0)(i=1,…,n)处有稳定平衡位置,取偏移量 ηi=qi−qi(0) 为新的广义坐标,使平衡位置对应各 ηi=0。
在平衡位置附近,将势能 V 对 ηi 做泰勒展开。由于平衡位置处各偏导 ∂V/∂ηi=0,展开从二阶项开始:
V≈21i,j∑
类似地,动能(广义速度的二次型)在平衡附近近似为:
T≈21i,j∑T
其中 Tij 为动能矩阵元素,取平衡点处的值。系统的拉格朗日量 L=T−V 变为两个二次型的差:
L=21η˙TT
由此得到线性运动方程组:
Tη¨+Vη=0
矩阵 T 称为动能矩阵(惯量矩阵),矩阵 V 称为势能矩阵(刚度矩阵)。两者均为实对称矩阵,且 T 正定(动能恒非负),V 在稳定平衡点处也正定(势能有极小值)。
两个质量均为 m 的质点排成一排,通过刚度为 k 的弹簧分别与两端固定壁相连,中间再用刚度为 kc 的弹簧相互耦合。取质点偏离平衡位置的位移 η1,η 为广义坐标,动能矩阵和势能矩阵分别为:
T=(m0
运动方程写成矩阵形式即为 Tη¨+Vη=0,两方程通过 kc 项相互耦合。
本征值方程与简正模式
设运动方程的解形如 η(t)=aeiωt,代入 Tη¨,得到广义本征值问题:
(V−ω2T)a=0
要使振幅向量 a 有非零解,系数矩阵的行列式必须为零:
det(V−ω2T)=0
这就是久期方程,它是关于 ω2 的 n 次方程,给出 n 个根 ω12,,称为系统的的平方。对每个 ,方程 有一个对应的解向量 ,称为第 个。
对于稳定平衡位置,所有 ωk2>0,简正频率均为实数。若某个 ωk2=0,则对应系统整体平移或转动的零频自由度;若出现 ,则表明该平衡位置不稳定,系统将偏离平衡点做指数增长运动。
对例一的耦合弹簧系统,久期方程为:
k+kc
展开得 (k+kc−mω2)2−k,解出两个简正频率:
ω12=mk,ω
耦合弹簧使第二模式频率升高,而第一模式频率与单个质点—弹簧系统完全相同。
简正坐标
通过线性变换,可以将耦合的运动方程解耦为 n 个独立的简谐振子方程。定义简正坐标 ξk,使得原坐标 η 表示为各简正模式向量的叠加:
η=k=1∑na(k)ξ
其中 a(k) 经过 T-正交归一化处理。代入运动方程并利用简正模式的正交性,得到解耦方程:
ξ¨k+ωk2ξ
每个简正坐标独立做简谐振动,互不干扰。
在简正坐标下,一个 n 自由度的耦合振动系统等价于 n 个独立的简谐振子。系统的任意运动都可以表示为各简正模式振动的叠加,这是振动分析中最核心的原则之一。
两个单摆,摆长均为 l,摆球质量均为 m,两摆球之间用刚度 kc 的弹簧相连(自然长度等于平衡时间距)。在小角度近似下,动能矩阵和势能矩阵为:
T=ml2(
两个简正频率为:
ω12=lg,ω
简正坐标 ξ1=(η1+η2)/(两摆角度之和)和 (角度之差)分别描述同相和反相模式,两者完全独立演化。
线性三原子分子的振动模式
以线性对称三原子分子(如 CO2)为例分析振动模式。分子由中间原子(质量 M,碳)和两侧原子(质量 m,氧)组成,相邻原子间以等效弹簧(刚度 k)连接。
仅考虑沿分子轴方向的纵向振动,设三个原子的纵向位移分别为 η1,η2,η3:
T=
久期方程给出三个简正频率:
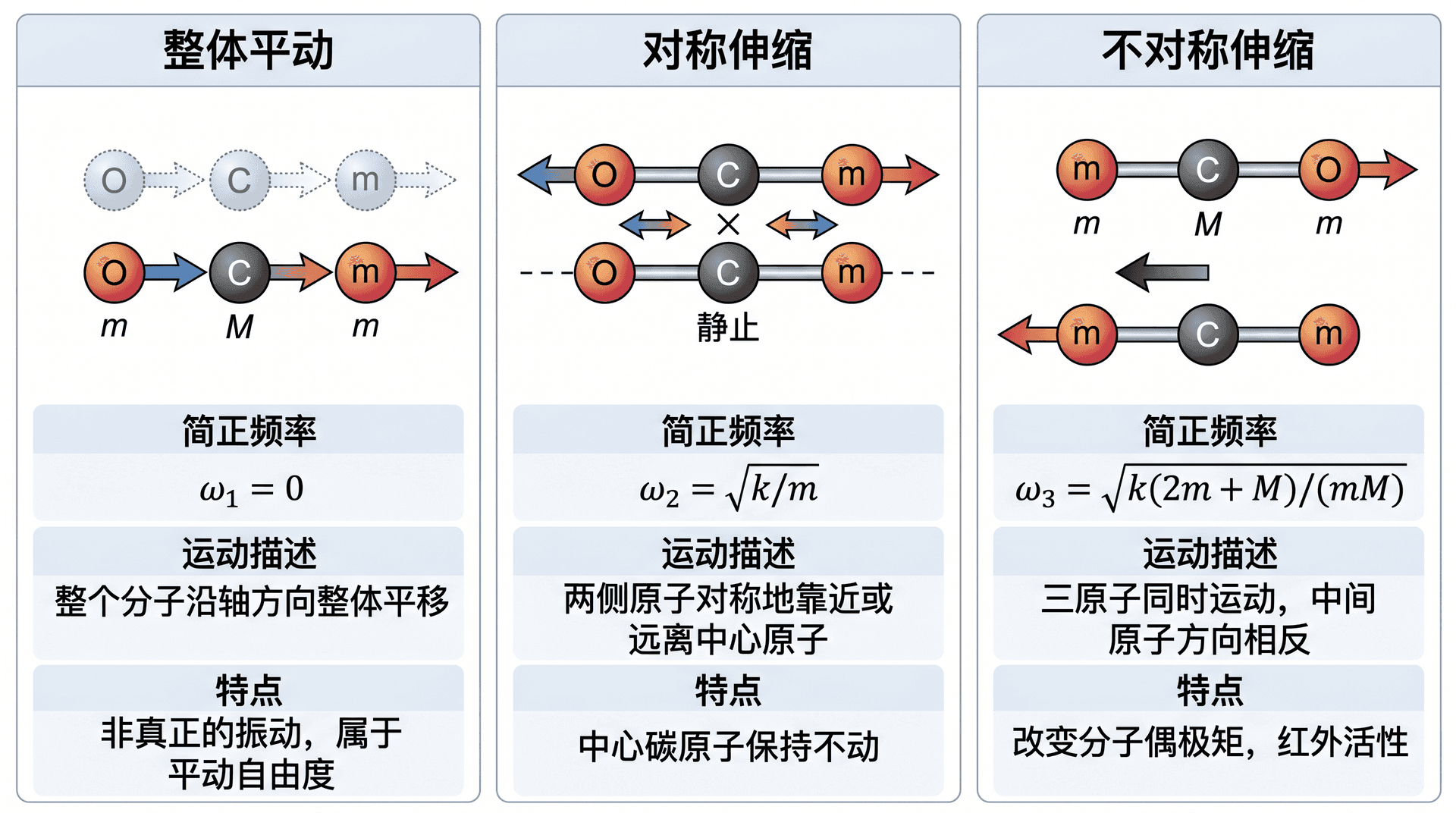
零频模式(ω1=0)对应整体平移,不属于振动自由度,而是系统的平动自由度。对 n 个原子组成的线性分子,共有 3n−5 个振动模式(扣除 3 个平动和 2 个转动自由度)。CO 有 3 个原子,振动模式共 个(包含一对简并的弯曲振动)。
- 例四:CO2 不对称伸缩频率量级估算
取 CO2 数据:m(O)=16u=2.66×10,, 键等效弹簧常数 (由光谱数据估算)。
ω3=mM
=5.29×10−521500×7.31
对应频率约 7.2THz,波长约 42μm,处于红外波段,与实验观测吻合良好。
受迫振动与阻尼效应
实际振动系统中,振动体不可避免地受到阻尼(能量耗散)和外驱动力的影响。以单自由度系统为例,质量 m、弹簧刚度 k、阻尼系数 b(阻尼力 Fb=−bx˙),受简谐外力 驱动时,运动方程为:
mx¨+bx˙+kx=F0cos(
引入固有频率 ω0=k/m 和阻尼率 ,方程改写为:
x¨+2γx˙+ω02x
通解由两部分构成。齐次部分描述自由阻尼振动,随时间指数衰减:
x齐次(t)=A0e
其中 ωd 为阻尼振动频率,在弱阻尼(γ≪ω0)时接近固有频率 ω。经过足够长时间后,瞬态响应衰减消失,系统进入:
x稳态(t)=A(Ω)cos(Ωt−δ)
稳态振幅 A(Ω) 和相位角 δ 为:
A(Ω)=(ω0
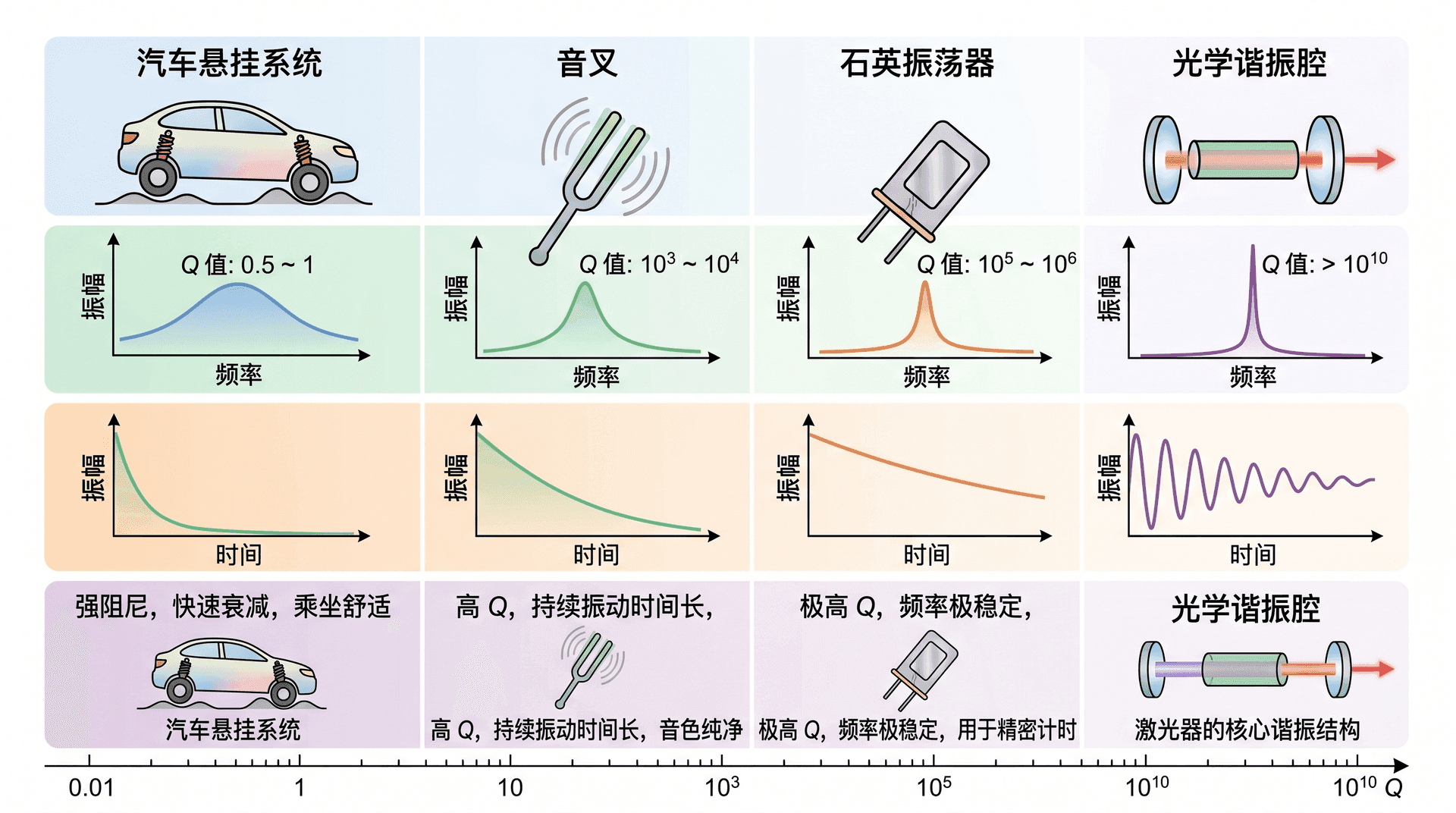
临界阻尼是使系统最快回到平衡位置而不发生振荡的最优阻尼条件,广泛应用于需要快速稳定的工程系统设计中。汽车减震器的设计目标正是接近临界阻尼。
弹簧—质量系统参数:m=0.5kg,k=200N/m,阻尼系数 b=2N⋅s/m,外力 ,求稳态振幅。
固有频率:ω0=k/m=
阻尼率:γ=b/(2m)=2/(2×0.5)=2rad/s
驱动频率 Ω=20rad/s=ω0(恰好在固有频率处驱动),代入振幅公式:
A=(ω02
共振条件与能量耗散
当驱动频率 Ω 接近系统固有频率 ω0 时,稳态振幅显著增大,这种现象称为共振。对振幅表达式 A(Ω) 求极值,得振幅最大时的共振频率:
Ω共振=ω02−2γ2
在弱阻尼时 Ω共振≈ω0。共振时的最大振幅为:
Amax≈2γω0F
Q=2γω0
Q 值综合反映系统的振荡性能:Q 越高,共振峰越尖锐,共振振幅越大,能量耗散越慢,系统的频率选择性越好。
在稳态受迫振动中,驱动力对系统的平均功率为:
Pˉ=21m
共振时(Ω=ω0),平均功率取最大值 Pˉmax=,驱动力输入的能量全部被阻尼耗散。
弹簧振子固有频率 ω0=10rad/s,品质因数 Q=50。初始振幅 A,弹簧刚度 。求经过 后振动能量剩余的百分比。
由 Q=ω0/(2γ),得 γ=ω。
振动能量正比于振幅平方,振幅随时间衰减为 A(t)=A0e−γt,因此能量衰减为:
E(t)=E0e−2γt
经过 t=1s:
E0E(1)=e−2×0.1×1
能量剩余约 81.9%,即在 1s 内约耗散了 18.1% 的振动能量。
练习题
- 1. 关于多自由度系统的简正模式,下列说法正确的是:
A. 简正模式下系统各质点以不同频率振动,相互独立
B. 系统的所有简正模式振动频率都相同
C. 在某一简正模式下,各质点以同一频率做简谐振动,振幅之比保持固定
D. 简正坐标之间存在耦合,无法独立处理
答案:C
分析:简正模式是指系统各部分以同一频率做简谐振动的运动方式,各质点的振幅之比(模式向量各分量之比)保持不变,C 正确。不同简正模式有各自不同的频率,B 错误(B 称各模式频率相同,有误)。A 描述的是不同简正模式各自独立,但同一模式内所有质点是同一频率,A 的说法混乱。简正坐标经过变换后恰好相互解耦,D 错误。
- 2. 一个欠阻尼系统(γ<ω0),其阻尼振动频率 ωd 与固有频率 ω 的大小关系是:
A. ωd>ω0
B. ωd=ω0
C. ωd<ω0
D. ωd 与 γ 无关,等于某个固定值
答案:C
分析:阻尼振动频率 ωd=ω02−γ2。由于 ,有 ,因此 。阻尼的存在使振动频率降低,C 正确。只有无阻尼时()才有 。
- 3. 在无阻尼条件下,系统受迫振动处于共振状态(驱动频率等于固有频率)时,下列说法正确的是:
A. 驱动力对系统做的净功为零,振幅保持恒定
B. 系统振幅随时间线性增长,理论上趋于无穷大
C. 系统振幅等于静态位移,不随驱动频率变化
D. 系统的速度与驱动力方向始终相反,能量反馈给驱动源
答案:B
分析:在无阻尼且驱动频率恰好等于固有频率时,系统响应中出现 tsin(ω0t) 型解,振幅随时间线性增长,理论上趋于无穷大,B 正确。实际系统中阻尼会限制振幅的增长。共振时驱动力与速度同相,驱动力持续做正功,A 错误。C 描述的是静力加载情形。D 描述相位关系有误。
- 4. 品质因数 Q 较大的振动系统,与 Q 较小的系统相比:
A. 共振峰更宽,能量耗散更快,振幅对频率变化不敏感
B. 共振峰更尖锐,能量耗散更慢,对特定频率选择性更强
C. 固有频率更高,阻尼力更大,振动持续时间更短
D. 共振振幅更小,系统对外界激励的响应更弱
答案:B
分析:品质因数 Q=ω0/(2γ),Q 越大则 γ 越小,阻尼越弱,能量耗散越慢。共振峰的半高宽为 ΔΩ, 越大则频带越窄、峰越尖锐,频率选择性越强,B 正确。A 描述相反。C 中固有频率 与 无必然关系。共振振幅 , 越大振幅越大,D 错误。
- 5. 一弹簧—质量系统参数为:质量 m=1kg,弹簧刚度 k=100N/m,阻尼系数 b=4N⋅s/m。(一)求固有频率 、阻尼率 和品质因数 ;(二)系统受外力 驱动,求稳态振幅;(三)求振幅共振频率,并与驱动频率比较。
解:
(一)固有频率:
ω0=mk
- 6. 两个质量均为 m=0.2kg 的质点,通过弹簧排列如下:质点 1 左侧连接固定壁(弹簧刚度 k1=20N/m),两质点之间用弹簧耦合(刚度 ),质点 2 右侧连接固定壁(弹簧刚度 )。求:(一)系统的两个简正频率;(二)描述每个简正模式的振动方式。
解:
(一)势能矩阵:
V=(k