刚体动力学方程
刚体是理想化的固体模型——任意两点之间的距离始终保持不变。在运动学层面,第四章已经建立了用欧拉角描述刚体姿态、用角速度矢量描述转动快慢的方法。进入动力学,核心问题变为:给定外力矩,刚体的角速度如何随时间变化?要回答这个问题,必须先理解刚体的转动惯量——它在转动中扮演「质量」的角色,但比质量复杂得多,是一个 3×3 的矩阵,称为惯量张量。
刚体的角动量与转动动能
刚体绕某基点(质心或固定点)转动时,各质量元的速度由角速度 ω 决定。对于位置矢量为 r 的质量元 dm,其速度为:
v=ω×r
刚体的角动量
将全部质量元的角动量积分,得到刚体对基点的总角动量:
L=∫r×vdm=∫r×(ω×
利用矢量三重积公式展开后,可以整理成矩阵乘法的形式:
简记为 L=Iω,其中 I 称为惯量张量(inertia tensor),单位为 kg⋅m2。
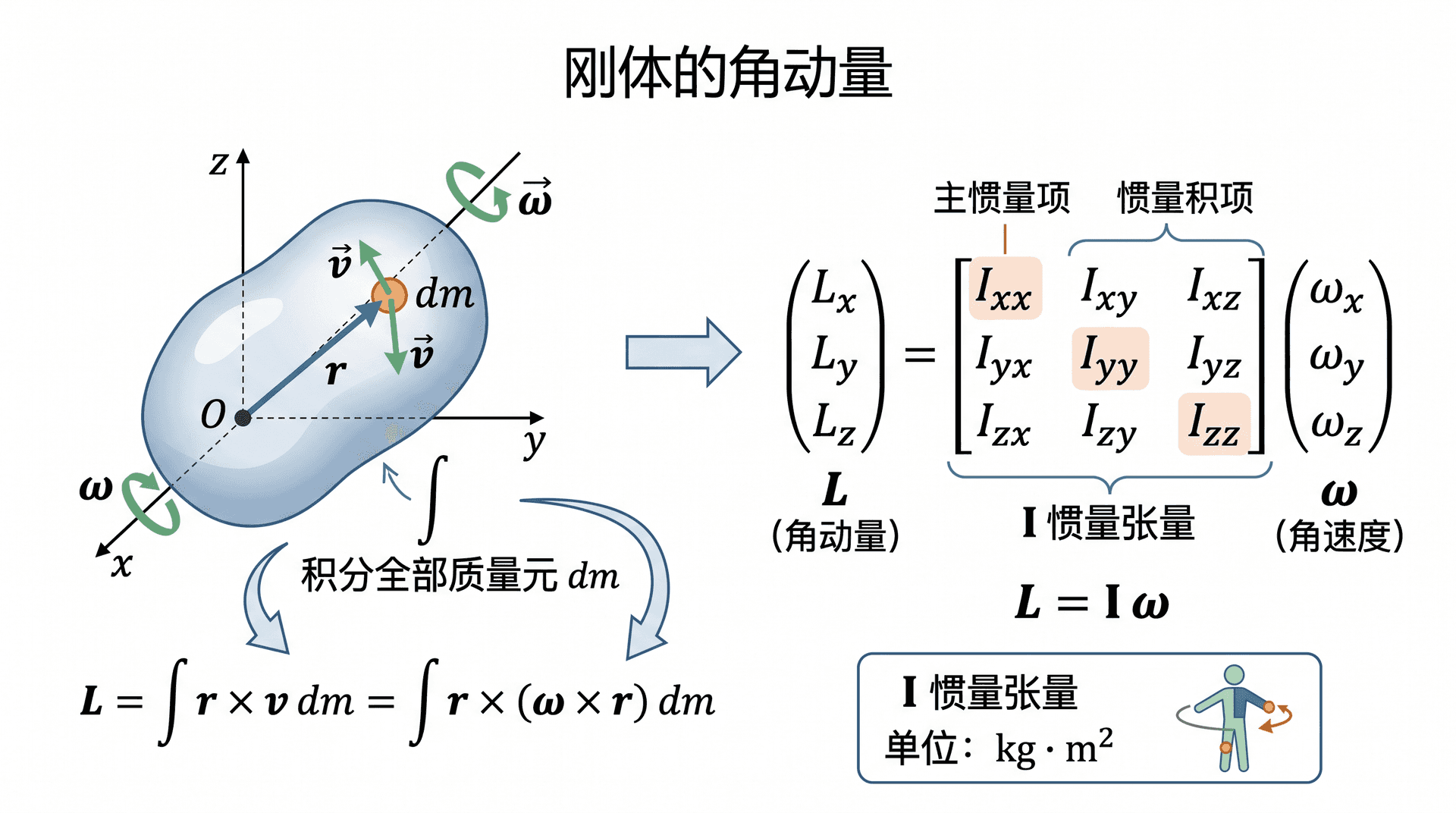
刚体的角动量与角速度之间并非简单的标量比例关系,而是由惯量张量联系的矩阵关系。只有当转轴恰好沿某些特殊方向(主轴方向)时,L 才与 ω 平行。
转动动能
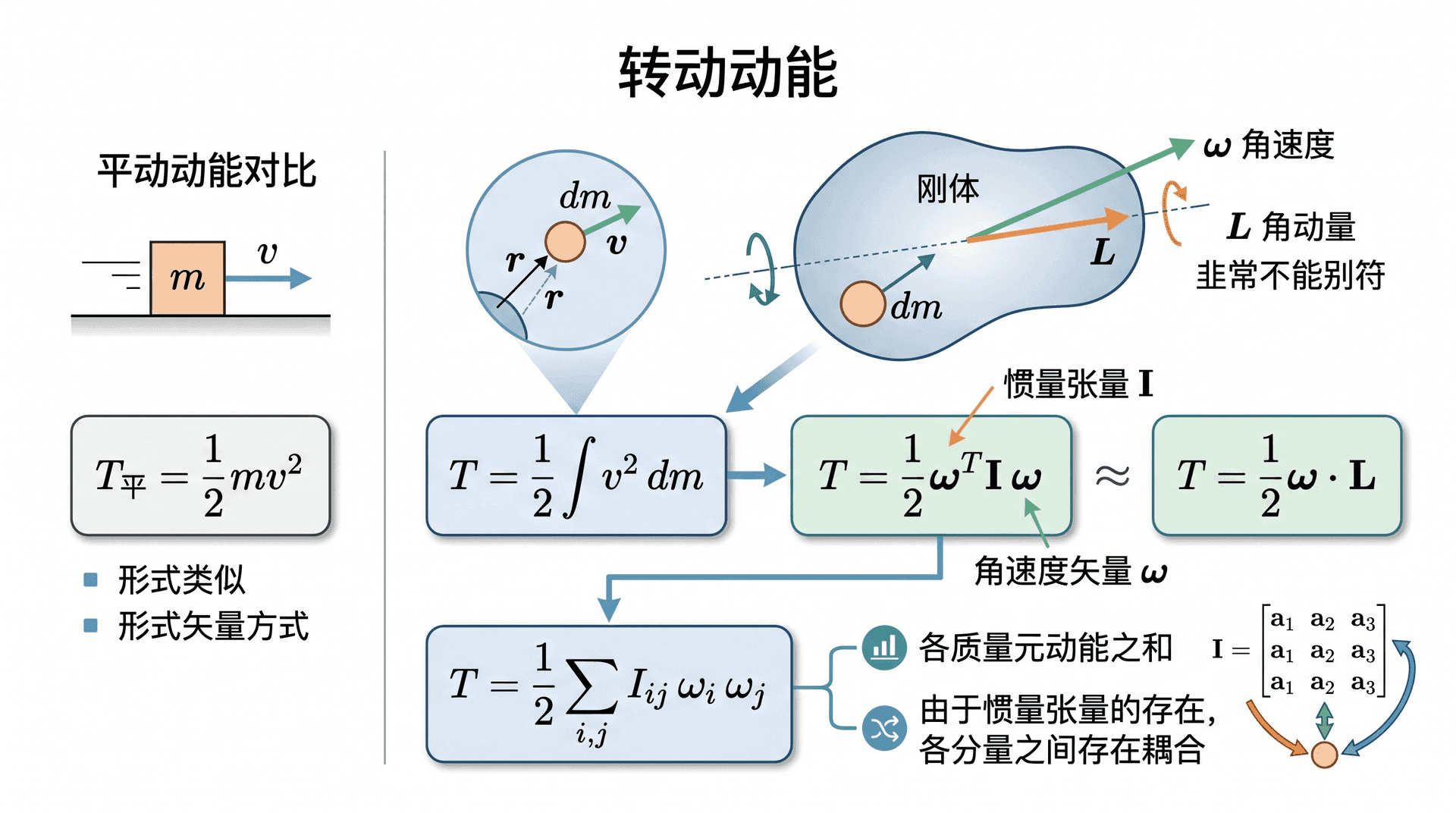
刚体的转动动能为各质量元动能之和:
T=21∫v2dm=
展开后得:
T=21i,j∑I
这与平动动能 T=21mv2 的形式类似,但由于惯量张量的存在,各分量之间存在耦合。
惯量张量的定义与计算
惯量张量的各分量
惯量张量是一个 3×3 的实对称矩阵,各分量定义为:
Iij=∫ρ(r)(δij
其中 ρ 为质量密度,δij 为克罗内克符号(i=j 时为 1,否则为 0),r。对角元称为,非对角元称为:
Ixx=∫ρ(y
Ixy=Iy
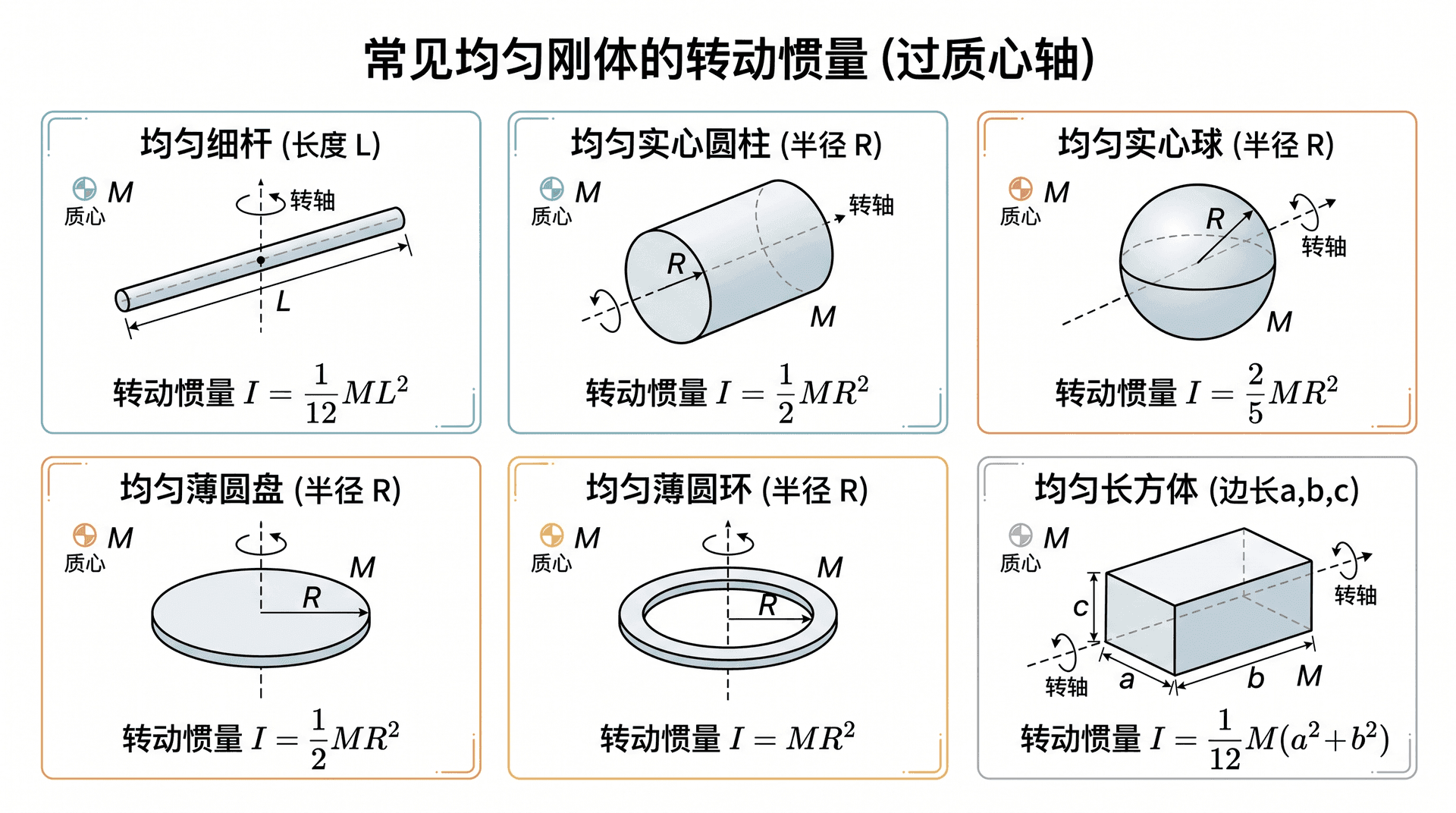
下表汇总了几种常见均匀刚体对过质心轴的转动惯量(总质量为 M):
平行轴定理
若已知刚体对过质心轴的转动惯量为 Icm,则对平行于该轴、距离为 d 的另一轴的转动惯量为:
I=Icm+Md2
这一定理将任意平行轴的计算化归为质心轴情形,避免重新积分。
细杆质量 M、长 L,过质心垂直轴的转动惯量 Icm=121M,端点轴与质心轴平行,距离 。由平行轴定理:
I端=121ML
端点轴的转动惯量是质心轴的 4 倍,说明质量分布离转轴越远,转动惯量越大。
垂直轴定理
对于质量分布在 xy 平面内的薄板,三个坐标轴的转动惯量满足:
Iz=Ix+Iy
其中 Iz 是绕垂直板面轴(z 轴)的转动惯量,Ix、I 分别是绕板面内两轴的转动惯量。
均匀薄圆盘(半径 R、质量 M),中心轴转动惯量 Iz=21MR。由圆盘的旋转对称性,绕任意直径的转动惯量相等,即 。由垂直轴定理:
Iz=2Ix⟹Ix
即绕圆盘直径的转动惯量为 41MR2,恰好是中心轴的一半。
惯量主轴与主惯量
主轴的概念
惯量张量 I 是实对称矩阵,由线性代数的谱定理,总存在三个正交方向,使得惯量张量在这些方向上取对角形式:
I主轴=
这三个正交方向称为惯量主轴,对应的 I1、I2、I3 称为主惯量。寻找主轴的数学步骤,就是求惯量张量的本征值和本征矢量:
Ie^=Ie^
找到主轴,就找到了描述刚体转动最简洁的坐标系。在主轴坐标系中,惯量张量为对角矩阵,所有惯量积为零,运动方程大为简化。这是后续推导欧拉方程的关键前提。
对称性对主轴的确定有决定性作用:
均匀实心圆柱,质量 M,半径 R,高度 H,以质心为原点,中心轴为 z 轴。由对称性,z 轴是主轴,另外两根主轴垂直于 z 轴,方向任意。三个主惯量为:
I3=21MR2,
I1>I3 说明绕径向轴转动时「转动惯性」更大,符合直觉:细长圆柱绕横轴转动需要更大力矩。
欧拉方程的推导与应用
推导过程
在惯性系(实验室坐标系)中,角动量定理写为:
dtdL惯性系=
其中 M 为外力矩。若改用与刚体固联的体坐标系(body frame)来计算,需加上坐标系转动引起的附加项:
dtdL
取主轴坐标系,使 I 为对角矩阵,L=(I1ω1,I,将上式按分量展开,得到:
I1ω˙1−(I2
I2ω˙2−(I3
I3ω˙3−(I1
欧拉方程在与刚体固联的主轴系中建立,避免了惯量张量的非对角元,是分析刚体转动动力学的标准工具。
转动稳定性——中间轴定理
将一本书(三个主惯量各不相同,I1<I2<I3)抛向空中并施加初始旋转。分三种情况讨论:绕最小惯量轴或最大惯量轴旋转时,运动是稳定的;绕中间惯量轴旋转时,运动是不稳定的,微小扰动将导致翻转。这一规律通过对欧拉方程做线性稳定性分析可以严格证明,实验中也能直接观察到,被称为「中间轴定理」或「网球拍效应」。
对于旋转对称刚体(I1=I2≡I⊥),无力矩情形()下欧拉方程化简为:
I⊥ω˙1
第三式给出 ω3=常数,即绕对称轴的自旋分量不变。定义进动角频率:
Ω=I⊥(I3−I
前两式的解为:
ω1(t)=ω⊥cos(Ωt+
角速度在垂直于对称轴的截面内以角频率 Ω 匀速旋转。
自由陀螺的运动
自由进动
无外力矩的旋转对称刚体(即「自由陀螺」)的运动,由上节例四的结果可以看出:角速度矢量 ω 的端点在体坐标系中绕对称轴做圆周运动,这称为自由进动。在惯性系中,角动量 L 方向固定(守恒),对称轴绕 L 方向旋转,轨迹是一个锥面。
下表给出了几种旋转对称刚体的进动频率与自旋频率之比:
均质薄圆盘(质量 M,半径 R=0.15m),主惯量 I⊥=4,。若圆盘绕对称轴以 自旋,进动角频率为:
Ω=I⊥
均质圆盘的自由进动频率恰好等于自旋频率,这是其几何特殊性 I3=2I⊥ 的直接结果。
地球是略扁的旋转椭球体(I3>I⊥)。按照自由进动公式,地轴应以约 305 天为周期绕地球对称轴进动。实际观测到的周期约为 433 天,称为「钱德勒摆动」。差异来源于地球的非刚性(地幔流动、海洋潮汐等)对有效惯量的影响。
对称重陀螺的稳定进动
问题描述
对称重陀螺是一个有一个固定点(如尖端)的旋转对称刚体,重力提供力矩,使运动更加复杂。用欧拉角 (ψ,θ,ϕ) 描述:ψ 为进动角(对称轴绕竖直轴旋转的角度),θ 为章动角(对称轴与竖直方向的夹角),ϕ 为自旋角(绕自身对称轴旋转的角度)。
对拉格朗日方程(参见第二章)分析此系统,ψ 和 ϕ 是循环坐标,对应两个守恒量:沿竖直方向的角动量分量 pψ 和沿对称轴的角动量分量 pϕ(即 )。
快速自旋近似
当陀螺快速旋转(I3ω3≫I⊥ψ˙)时,稳定进动()的进动角速度近似为:
ψ˙≈I3ω3
其中 M 为陀螺质量,g 为重力加速度,l 为固定点到质心的距离,ω3 为绕对称轴的自旋角速度。
进动速度与自旋速度成反比:陀螺自旋越快,在重力矩作用下的进动越慢。这就是快速旋转陀螺能保持「不倒」的物理根源——角动量很大,方向改变缓慢。
对称陀螺参数:质量 M=0.2kg,固定点到质心距离 l=0.05m,绕对称轴转动惯量 I3,转速 。
自旋角速度:
ω3=602πn=
快速自旋近似下的进动角速度:
ψ˙≈I3
进动周期:
Tψ=ψ˙2π≈
陀螺每约 10 秒绕竖直轴缓慢进动一圈,与日常观察的陀螺行为一致。
练习题
- 1. 关于刚体的角动量与角速度,以下说法正确的是:
A. 刚体的角动量方向一定与角速度方向相同
B. 只有当转轴恰好沿惯量主轴方向时,角动量才与角速度平行
C. 无论沿哪个方向转动,角动量大小都等于某一固定的转动惯量乘以角速度大小
D. 惯量张量只对具有旋转对称性的刚体才有意义
答案:B
分析:一般情况下,L=Iω,L 与 ω 不平行,排除 A。只有 ω 沿主轴方向时,L(标量乘法),两者才平行,故 B 正确。不同方向的转动惯量由惯量张量的投影决定,不是固定值,排除 C。惯量张量对任意刚体都有定义,排除 D。
- 2. 平行轴定理 I=Icm+Md2 的使用条件是:
A. 两轴之间没有要求,可以不平行
B. 两轴必须平行,且其中一轴过质心
C. 两轴必须都过质心
D. 仅对均质刚体成立,非均质刚体不适用
答案:B
分析:平行轴定理要求两根轴互相平行,且其中一根必须过质心(质心轴)。若质心轴的转动惯量已知,则任何平行于它、距离为 d 的轴的转动惯量均可直接由 I=Icm+Md2 得出。该定理对任意质量分布(均质或非均质)的刚体均成立,排除 D。
- 3. 无力矩旋转对称刚体(I1=I2≡I⊥)做自由进动时,以下哪个量不守恒?
A. 角动量 L 的大小与方向
B. 转动动能 T
C. 体坐标系中角速度矢量 ω 的方向
D. 绕对称轴的角速度分量 ω3
答案:C
分析:无力矩时,惯性系中角动量 L 守恒(大小方向均不变),故 A 守恒。动能 T=ω⋅L/2,ω 大小(ω)守恒, 也守恒,故 B 守恒。由欧拉方程, 为常数,故 D 守恒。但 在体系中绕对称轴旋转,即 的方向在体坐标系中持续变化,故 C 不守恒。
- 4. 一个快速旋转的对称陀螺在重力矩下做稳定进动,若将其自旋转速提高为原来的 3 倍,进动角速度变为原来的:
A. 3 倍
B. 3 倍
C. 1/3 倍
D. 不变
答案:C
分析:快速自旋近似下进动角速度为 ψ˙≈I3ω3,与自旋角速度 成反比。自旋提高为 3 倍,进动角速度变为原来的 ,陀螺进动更慢,更加稳定。
- 5. 均匀薄圆盘质量 M=0.5kg,半径 R=0.20m。求:(一)圆盘绕中心轴的转动惯量 Iz;(二)利用平行轴定理,求圆盘绕过盘缘且垂直盘面的轴的转动惯量 ;(三)利用垂直轴定理,求圆盘绕通过质心的直径轴的转动惯量 。
解:
(一)中心轴转动惯量:
Iz=21MR
- 6. 对称陀螺参数如下:质量 M=0.30kg,固定点到质心距离 l=0.08m,绕对称轴转动惯量 I3,转速 。取 。求:(一)自旋角速度 ;(二)利用快速自旋近似,求稳定进动角速度 和进动周期 。
解:
(一)自旋角速度:
ω3=602πn=