刚体运动学
刚体是理论力学中比质点更接近真实物体的模型。所谓刚体,是指在运动过程中内部任意两点之间的距离始终保持不变的物体。现实中的铁块、陀螺、行星等,在不考虑形变的情况下,都可以用刚体模型来描述。刚体的运动比质点更丰富——它不仅可以平动,还可以绕轴转动,如何用数学语言精确描述这种转动,正是刚体运动学的核心任务。
刚体的自由度
确定一个物体在空间中的位置和姿态,需要指定一组独立参数,这些参数的个数称为系统的自由度。
对于自由空间中的单个质点,只需给出三个坐标 (x,y,z) 就可以完全确定其位置,自由度为 3。
刚体比质点复杂:除了整体位置,还需要描述其姿态(即朝向)。先固定刚体上的某个参考点(一般取质心),用三个坐标描述其位置;再确定刚体绕该点的方向,需要另外三个独立的转动参数。因此,空间中自由刚体共有 6 个自由度。
在实际问题中,约束会减少自由度。例如:
刚体的 6 个自由度分别由 3 个平动参数和 3 个转动参数描述。平动参数通常取质心坐标,转动参数的选取方式有多种,欧拉角就是其中最常用的一种。
正交变换与方向余弦矩阵
描述刚体的转动,最系统的工具是旋转矩阵。
设固定在刚体上的坐标系(体坐标系)为 Ox′y′z′,空间中固定不动的坐标系(惯性系)为 Oxyz。两个坐标系的原点重合,它们之间的关系可以用一个 3 的矩阵 表示:
x
矩阵 A 的元素 aij 是体坐标系第 i 个轴的单位矢量与惯性系第 j 个轴单位矢量的内积,即两轴夹角的余弦值,因此 A 称为方向余弦矩阵。
由于旋转不改变矢量的长度,方向余弦矩阵满足正交性条件:
AAT=ATA=I
其中 I 是单位矩阵。正交矩阵还满足 det(A)=±1,对于纯旋转(不含反射),det(A)=+1。
将坐标系绕 z 轴转过角度 φ,新旧坐标之间的关系为:
Az(φ)=
验证正交性:AzAzT=I,det(A,满足纯旋转的条件。
类似地,绕 x 轴和 y 轴旋转的矩阵分别为:
任意空间旋转都可以分解为绕三个坐标轴的依次旋转,即三个基本旋转矩阵的乘积:
A=Az(ψ)Ax(θ)A
旋转矩阵的乘法一般不满足交换律。先绕 x 轴转 90°、再绕 z 轴转 90°,与先绕 z 轴、再绕 x 轴的结果通常不同。这意味着有限转动不是矢量,不能像位移那样相加。
欧拉角
欧拉角是描述刚体转动姿态最常用的三个参数,分别记为 φ(进动角)、θ(章动角)和 ψ(自转角)。
从惯性系 Oxyz 到体坐标系 Ox′y′z′,欧拉角规定了一套固定的转动顺序:
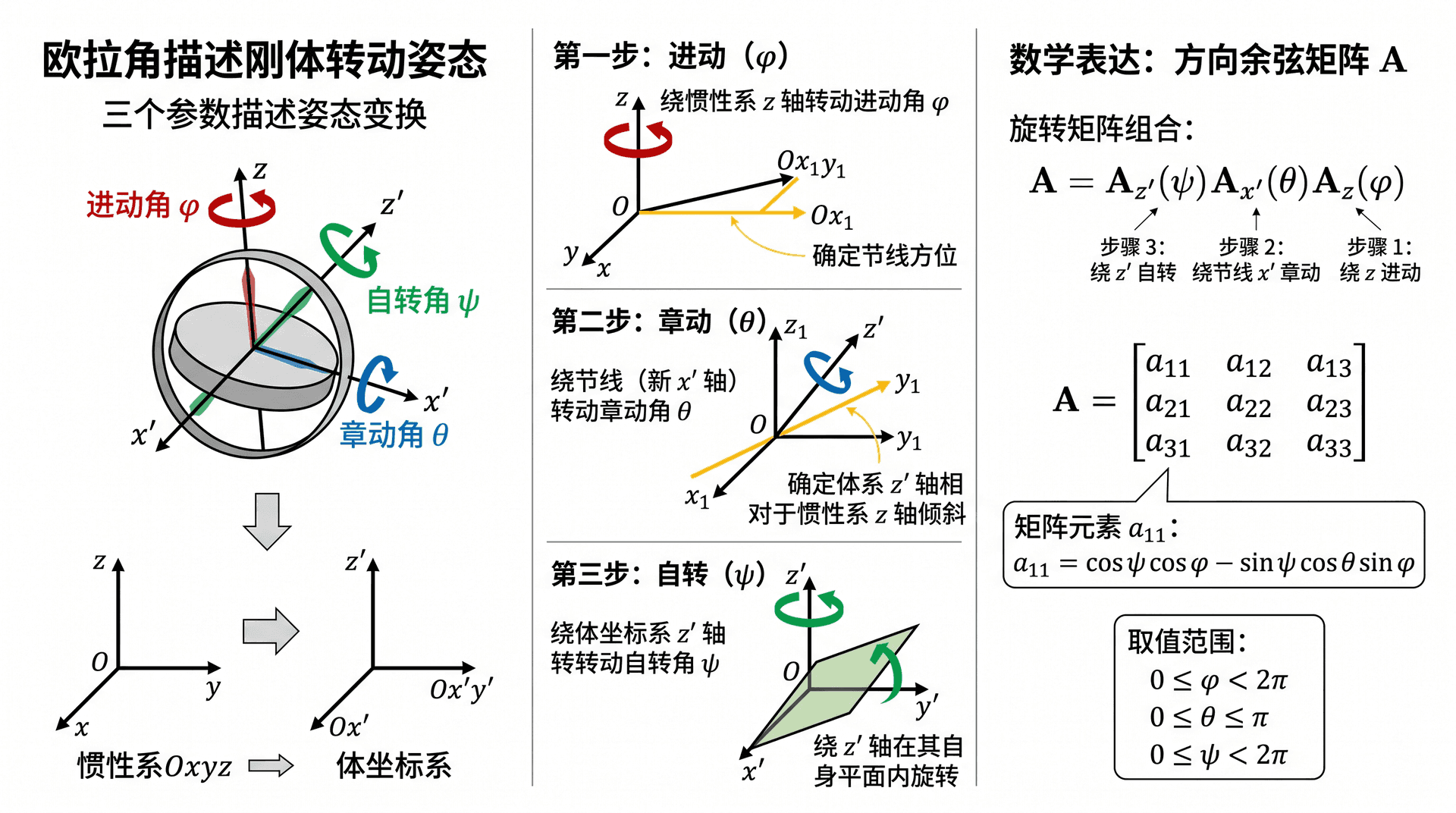
三次旋转的组合给出完整的方向余弦矩阵:
A=Az′(ψ)Ax
展开后,方向余弦矩阵的各元素均为 φ、θ、ψ 的三角函数。例如矩阵第一行第一列的元素为:
a11=cosψcosφ−sinψcosθsinφ
欧拉角的取值范围通常规定为:
0≤φ<2π,0≤θ≤π,0≤ψ<2π
地球在绕太阳公转的同时自转。以地球质心为原点,取太阳方向为惯性系参考方向。地球的章动角 θ 对应地轴与公转轨道法线的夹角,约为 23.5°;进动角 φ 描述地轴在宇宙空间中的指向(约每 26000 年转一周,称为岁差);自转角 ψ 则描述地球每天自转 360°。
欧拉角提供了描述刚体任意朝向的一套完备参数。它的三个角具有明确的物理含义:进动角描述“在哪个方向转”,章动角描述“倾斜了多少”,自转角描述“绕自身转了多少”。陀螺、卫星姿态控制、飞行器导航中都广泛使用欧拉角。
刚体的角速度矢量
刚体的转动快慢和转动方向可以用一个矢量来统一描述,称为角速度矢量 ω。
角速度矢量的方向沿瞬时转动轴(按右手定则确定),大小等于角速度的数值,单位为 rad/s。
利用欧拉角,角速度矢量可以分解为三个欧拉角速率的贡献:
ω=φ˙e^z
其中 e^z 是惯性系 z 轴方向,e^ 是节线方向, 是体坐标系 轴方向。
将 ω 投影到体坐标系的三个轴上,得到体坐标分量(常用于欧拉方程):
ωx′=φ˙sinθsinψ+
ωy′=φ˙sinθcosψ−
ωz′=φ˙cosθ+
一个对称陀螺,章动角 θ=30° 保持不变(θ˙=0),进动角速率 φ˙=,自转角速率 。求角速度在体坐标系 轴的分量 。
ωz′=φ˙
下面给出不同参数组合下角速度 z′ 分量的变化:
当 θ=90°(体轴垂直于惯性 z 轴)时,进动对 ωz′ 没有贡献。
惯性系与转动系中的时间导数
刚体在转动时,固定在刚体上的参考系(体坐标系)也随之转动。同一个矢量 A,在惯性系和转动系中求时间导数,结果不同。
设转动系相对惯性系的角速度为 ω。转动系的三个单位基矢 e^1′、e、 随体坐标系转动,它们对时间的导数为:
dtde^i′=
设 A=A1′e^,在惯性系中求导:
(dtdA)惯性=
这就是矢量时间导数的转系公式,是非惯性参考系力学中最核心的关系式。
公式 (dtdA)惯性= 的含义:矢量在惯性系中的变化率,等于它在转动系中的变化率,加上因坐标系本身转动而引起的附加变化率 。
一个圆转盘绕竖直轴以角速度 ω=2rad/s 匀速转动。一个小球在盘面上沿转盘径向方向以速度 v′=3m/s(相对于盘)向外滑动,当前距转轴 r=。
在转动系(盘)中,小球速度为 v′=v′e^r。
利用导数关系,在惯性系中,小球速度为:
v惯性=v′+ω×r
其中 ω×r 的大小为 ωr=2×1=2m/s,方向沿切向 。因此:
∣v惯性∣=(v′
科里奥利效应
将矢量时间导数的转系公式应用于质点的加速度,可以得到非惯性转动参考系中的运动方程。
设质点在惯性系中受合力 F,在转动系(角速度 ω,角加速度 ω˙)中的位置为 r′,速度(相对于转动系)为 。在转动系中,运动方程变为:
ma′=F−mω˙
右边后三项是附加的“惯性力”:
- 科里奥利力(Coriolis force)的大小为:
F科=2mωv′sinα
其中 α 是速度 v′ 与 ω 之间的夹角,单位为 N。
地球自转角速度 ω⊕=7.27×10−5rad/s,旋转轴指向北极。在地球表面(转动系中),运动的物体会受到科里奥利力的作用,导致运动轨迹偏转。
在北半球,ω 有向上的分量,对水平运动的物体,科里奥利力使其向右偏转;在南半球则向左偏转。
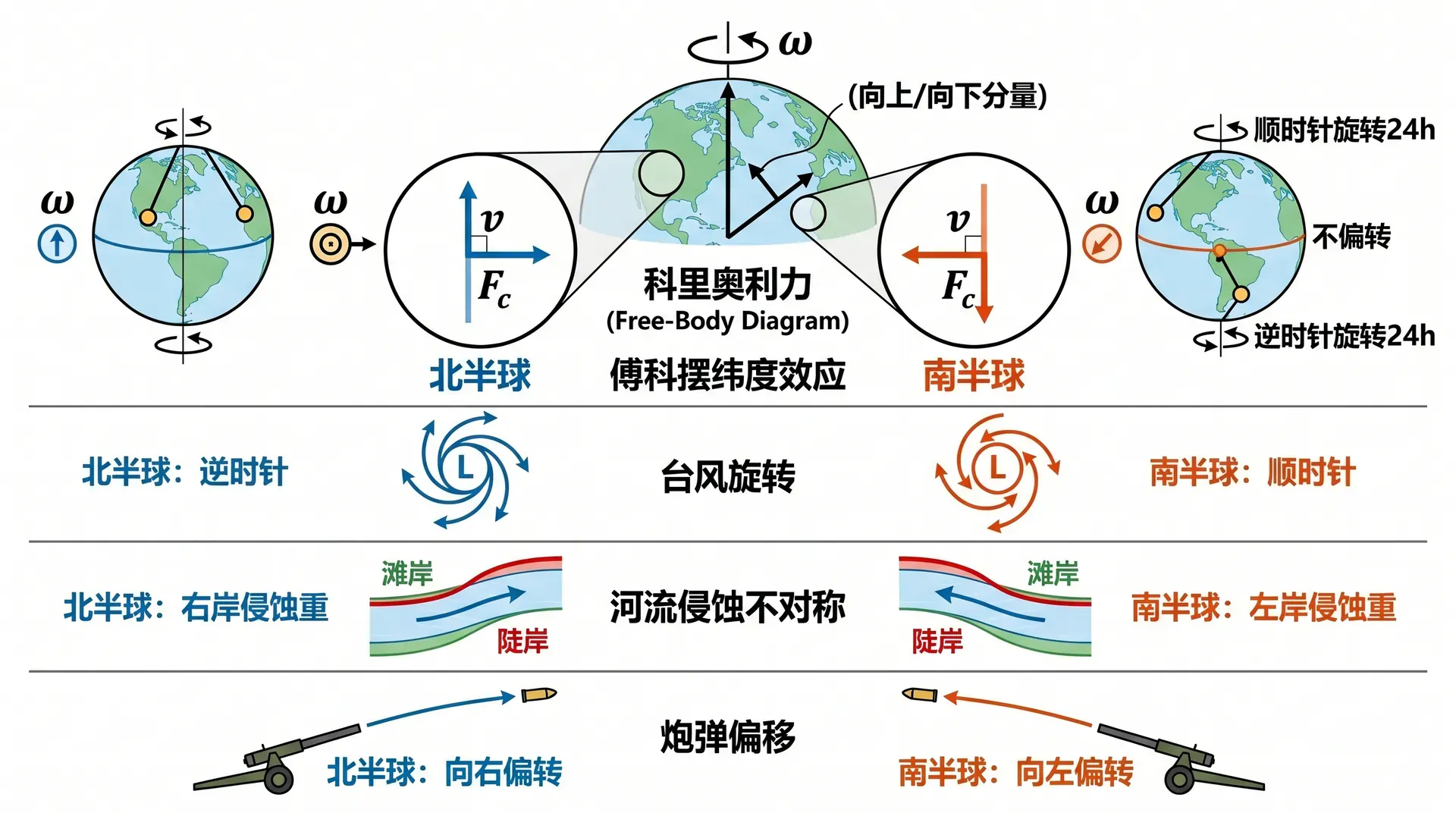
在纬度 λ 处,傅科摆摆动平面的旋转角速率为:
Ω=ω⊕sinλ
在北极(λ=90°):Ω=7.27×10−5rad/s,摆动平面旋转一圈需要 ,即恰好一天。
在北京(λ≈40°):
Ω=7.27×10−5×sin40°≈7.27×10
旋转一周需要:
T=Ω2π=4.67×10
即北京的傅科摆约每 37.4 小时旋转一圈,在赤道(λ=0°)处,Ω=0,摆动平面完全不旋转。
练习题
A. 有限转动可以用矢量表示,因为它有大小和方向
B. 两次有限转动的合成满足交换律,与顺序无关
C. 有限转动不满足矢量加法的交换律,顺序不同结果不同
D. 方向余弦矩阵的行列式可以为任意实数
答案:C
分析:有限转动不满足交换律,先绕 x 轴转 90° 再绕 z 轴转 90°,与先绕 z 轴再绕 x 轴,结果通常不同,因此 C 正确,A 和 B 错误。方向余弦矩阵是正交矩阵,行列式只能为 +1(纯旋转)或 (含反射),D 错误。
- 2. 在北半球,一股向南运动的风(即北风)受科里奥利力的影响,其偏转方向是:
A. 向东偏转(向左)
B. 向西偏转(向右)
C. 向上偏转
D. 不偏转,科里奥利力只影响东西方向运动
答案:B
分析:在北半球,地球自转角速度 ω 的竖直分量向上。科里奥利力为 F=−2mω×v′。对向南运动(v 指向南,即 方向), 竖直分量指向 ,则 (向东),科里奥利力 ,即向西。北半球水平运动的物体偏向运动方向的右侧,向南运动的右侧即向西,选 B。
- 3. 欧拉角中,章动角 θ 的物理含义是:
A. 刚体绕自身对称轴的自转角速率
B. 体坐标系 z′ 轴相对于惯性系 z 轴的夹角
C. 刚体在水平面内绕竖直轴的旋转角
D. 刚体的总转动角速度大小
答案:B
分析:欧拉角由进动角 φ、章动角 θ、自转角 ψ 组成。章动角 θ 描述体坐标系 z′ 轴(刚体对称轴)与惯性系 z 轴的夹角,是描述“倾斜程度”的参数,B 正确。进动角 描述绕惯性 轴的旋转,自转角 描述绕体 轴的自转,均不是 的含义,排除 A、C、D。
- 4. 关于转动参考系中的科里奥利力,下列说法正确的是:
A. 科里奥利力只与质点的位置有关,与速度无关
B. 质点在转动系中静止时,科里奥利力最大
C. 科里奥利力的方向总是垂直于质点在转动系中的速度
D. 科里奥利力是真实的相互作用力,存在反作用力
答案:C
分析:科里奥利力 F科=−2mω×v′,其大小与质点在转动系中的速度 v 成正比,质点静止时为零,A 错误,B 错误。科里奥利力方向为 的反方向,叉积结果垂直于 ,因此科里奥利力始终垂直于质点速度,C 正确。科里奥利力是惯性力(非惯性系中的虚拟力),没有施力物体,也没有反作用力,D 错误。
- 5. 一个陀螺的章动角 θ=60°,进动角速率 φ˙=3rad/s,自转角速率 ,(稳定进动)。求角速度矢量在体坐标系三个轴上的分量 、、,并计算角速度的大小 。取 时刻计算。
解:
取 ψ=0,θ˙=0,代入欧拉角速度公式:
ω
- 6. 在纬度 λ=30° 的地方,一枚炮弹以速度 v=600m/s 向正北方向水平发射,飞行时间 t=50s。地球自转角速度 。求:(一)炮弹所受科里奥利力的大小(取炮弹质量 );(二)飞行结束时炮弹相对于无地球自转情况的侧向偏移量。
解:
(一)炮弹向北运动,速度方向水平指北。在纬度 λ=30° 处,地球自转角速度 ω 在竖直方向的分量为 ω⊕sinλ,对水平向北运动的物体,科里奥利力指向东方(北半球向右偏转):
科里奥利力大小(取 ω 与 夹角分析,水平运动时贡献最大的分量):