物理 理论力学核心 分析力学与拉格朗日方程 分析力学与拉格朗日方程
从牛顿力学出发处理复杂系统时,常常需要求解大量约束力。以一根细绳悬挂的单摆为例,绳子的张力虽然始终存在,却对摆的运动轨迹毫无贡献——我们真正关心的只有摆角随时间的变化。分析力学正是从这一角度出发:抛开约束力,选取最自然的独立变量来描述系统状态,将运动方程的推导变成一套统一的算法。拉格朗日方程是这套算法的核心,它适用于从单摆到多体系统、从平面运动到三维转动的各类力学问题。
广义坐标与自由度
描述一个力学系统的状态,需要给出系统中各质点的位置。然而,对于有约束的系统,各质点的坐标之间存在约束方程,真正独立的变量数往往远少于所有坐标的总数。
系统真正独立的运动自由数称为自由度 ,记为 s s s N N N k k k
s = 3 N − k s = 3N - k s = 3 N − k 用来完整描述系统构型的 s s s q 1 , q 2 , … , q s q_1, q_2, \ldots, q_s q 1 , q 2 , … , q s 广义坐标 。广义坐标不必是直角坐标,可以是角度、面积、比值等任何能区分不同构型的量,只要满足独立性和完备性即可。
质量为 m m m l l l x 2 + y 2 = l 2 x^2 + y^2 = l^2 x 2 + y 2 = l 2 s = 2 − 1 = 1 s = 2 - 1 = 1 s = 2 − 1 = 1 θ \theta θ θ \theta θ
x = l sin θ , y = − l cos θ x = l\sin\theta, \quad y = -l\cos\theta x = l sin θ , y = − l cos θ 这样,原本需要两个坐标描述的问题简化为一个广义坐标的问题,约束力(绳的张力)也自动从方程中消失。
拉格朗日函数
用广义坐标描述系统后,引入一个关键量——拉格朗日函数 (简称拉氏量),定义为系统动能与势能之差:
L = T − V L = T - V L = T − V 其中 T T T V V V L L L q i q_i q i q ˙ i \dot{q}_i q ˙ i t t t L = L ( q 1 , … , q s , q ˙ 1 , … , q ˙ s , t ) L = L(q_1, \ldots, q_s,\ \dot{q}_1, \ldots, \dot{q}_s,\ t) L = L ( q 1 , … , q s , q ˙ 1 , … , q ˙ s , t )
拉格朗日函数 L = T − V L = T - V L = T − V L L L
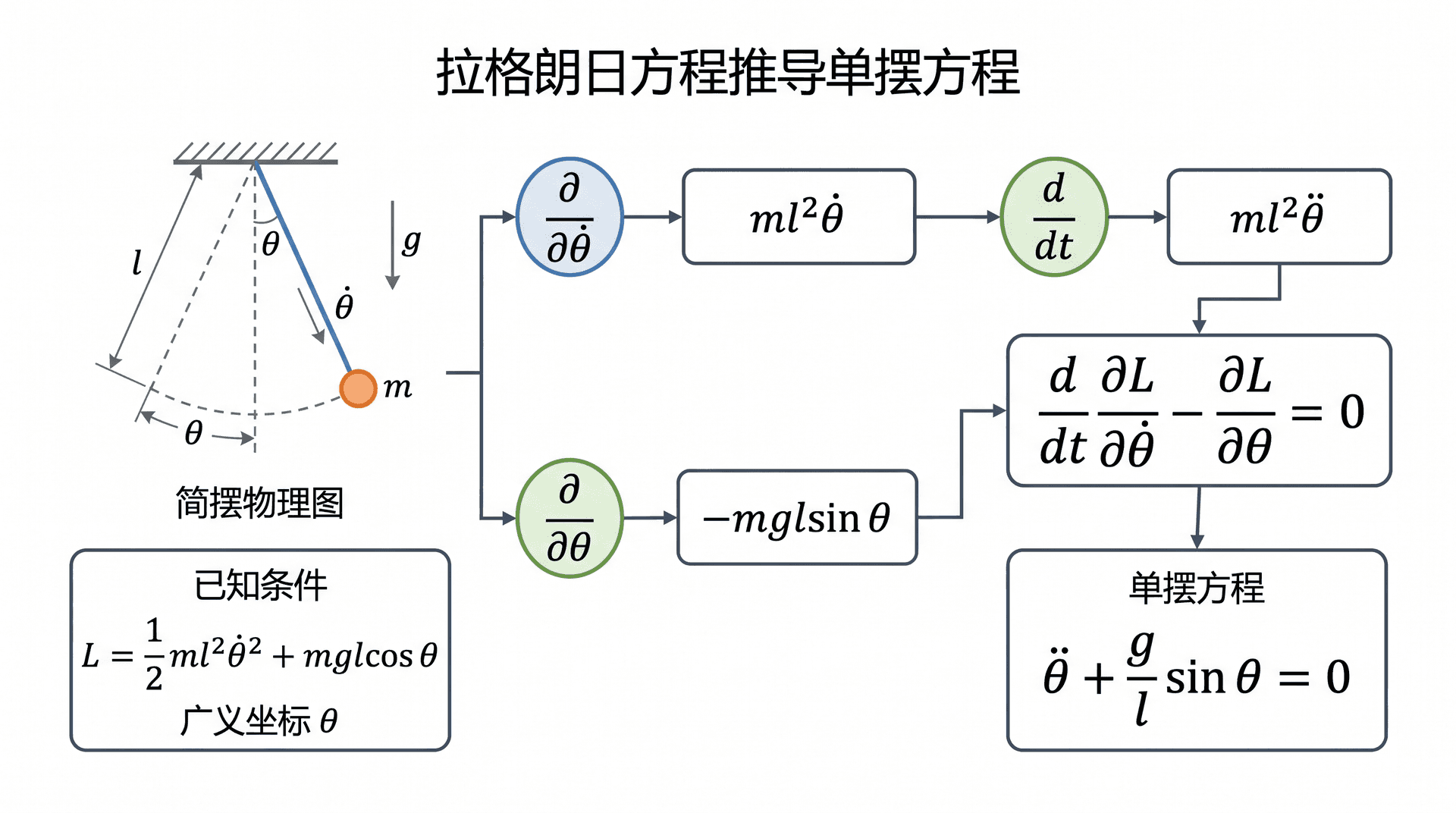
以摆角 θ \theta θ ( l sin θ , − l cos θ ) (l\sin\theta,\, -l\cos\theta) ( l sin θ , − l cos θ ) l θ ˙ l\dot{\theta} l θ ˙
T = 1 2 m ( l θ ˙ ) 2 = 1 2 m l 2 θ ˙ 2 T = \frac{1}{2}m(l\dot{\theta})^2 = \frac{1}{2}ml^2\dot{\theta}^2 T = 2 1 m ( l θ ˙ ) 2 = 2 1 m l 2 θ ˙ 2 V = − m g l cos θ V = -mgl\cos\theta V = − m g l cos θ L = T − V = 1 2 m l 2 θ ˙ 2 + m g l cos θ L = T - V = \frac{1}{2}ml^2\dot{\theta}^2 + mgl\cos\theta L = T − V = 2 1 m l 2 θ ˙ 2 + m g l cos θ 注意势能中取负号,是因为以悬挂点为零点时,质点位于 y = − l cos θ y = -l\cos\theta y = − l cos θ V = m g ( − l cos θ ) = − m g l cos θ V = mg(-l\cos\theta) = -mgl\cos\theta V = m g ( − l cos θ ) = − m g l cos θ
哈密顿原理
分析力学的理论基础是哈密顿原理 (也称最小作用量原理)。它不从力出发,而是从一个积分量——作用量 出发,给出系统运动规律的变分表述。
定义从时刻 t 1 t_1 t 1 t 2 t_2 t 2
S = ∫ t 1 t 2 L d t S = \int_{t_1}^{t_2} L\,dt S = ∫ t 1 t 2 L d t 哈密顿原理 陈述如下:在所有满足边界条件(即两端固定 q i ( t 1 ) q_i(t_1) q i ( t 1 ) q i ( t 2 ) q_i(t_2) q i ( t 2 ) S S S
δ S = δ ∫ t 1 t 2 L d t = 0 \delta S = \delta\int_{t_1}^{t_2} L\,dt = 0 δ S = δ ∫ t 1 t 2 L d t = 0 这里 δ \delta δ
哈密顿原理本质上说的是:自然界中的运动总是沿着“作用量取极值”的路径进行。这一思想与光学中的费马原理(光沿光程最短路径传播)有深刻的类比,体现了自然定律的极值性质。
拉格朗日方程的推导
从哈密顿原理出发,通过变分运算可以推导出拉格朗日方程。对作用量做变分,将 δ S = 0 \delta S = 0 δ S = 0 δ q i ( t 1 ) = δ q i ( t 2 ) = 0 \delta q_i(t_1) = \delta q_i(t_2) = 0 δ q i ( t 1 ) = δ q i ( t 2 ) = 0 q i q_i q i
d d t ∂ L ∂ q ˙ i − ∂ L ∂ q i = 0 , i = 1 , 2 , … , s \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} - \frac{\partial L}{\partial q_i} = 0, \quad i = 1, 2, \ldots, s d t d ∂ q ˙ i ∂ L − ∂ q i ∂ L = 0 , i = 1 , 2 , … , s 这就是拉格朗日方程 ,也称欧拉-拉格朗日方程。对于有 s s s s s s s s s
拉格朗日方程的使用步骤:第一步写出系统的动能 T T T V V V L = T − V L = T - V L = T − V q i q_i q i ∂ L / ∂ q ˙ i \partial L/\partial \dot{q}_i ∂ L / ∂ q ˙ i ∂ L / ∂ q i \partial L/\partial q_i ∂ L / ∂ q i d d t ∂ L ∂ q ˙ i − ∂ L ∂ q i = 0 \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} - \frac{\partial L}{\partial q_i} = 0 d t d ∂ q ˙ i ∂ L − ∂ q i ∂ L = 0
由例二已知 L = 1 2 m l 2 θ ˙ 2 + m g l cos θ L = \dfrac{1}{2}ml^2\dot{\theta}^2 + mgl\cos\theta L = 2 1 m l 2 θ ˙ 2 + m g l cos θ θ \theta θ
计算各偏导数:
∂ L ∂ θ ˙ = m l 2 θ ˙ , d d t ∂ L ∂ θ ˙ = m l 2 θ ¨ \frac{\partial L}{\partial \dot{\theta}} = ml^2\dot{\theta}, \quad \frac{d}{dt}\frac{\partial L}{\partial \dot{\theta}} = ml^2\ddot{\theta} ∂ θ ˙ ∂ L = m l 2 θ ˙ , d t d ∂ θ ˙ ∂ L = m l 2 θ ¨ ∂ L ∂ θ = − m g l sin θ \frac{\partial L}{\partial \theta} = -mgl\sin\theta ∂ θ ∂ L = − m g l sin θ 代入拉格朗日方程:
m l 2 θ ¨ − ( − m g l sin θ ) = 0 ⟹ θ ¨ + g l sin θ = 0 ml^2\ddot{\theta} - (-mgl\sin\theta) = 0 \implies \ddot{\theta} + \frac{g}{l}\sin\theta = 0 m l 2 θ ¨ − ( − m g l sin θ ) = 0 ⟹ θ ¨ + l g sin θ = 0 与上一部分内容用达朗贝尔原理得到的结果完全一致,但推导过程更加系统,约束力(绳的张力)始终未出现。
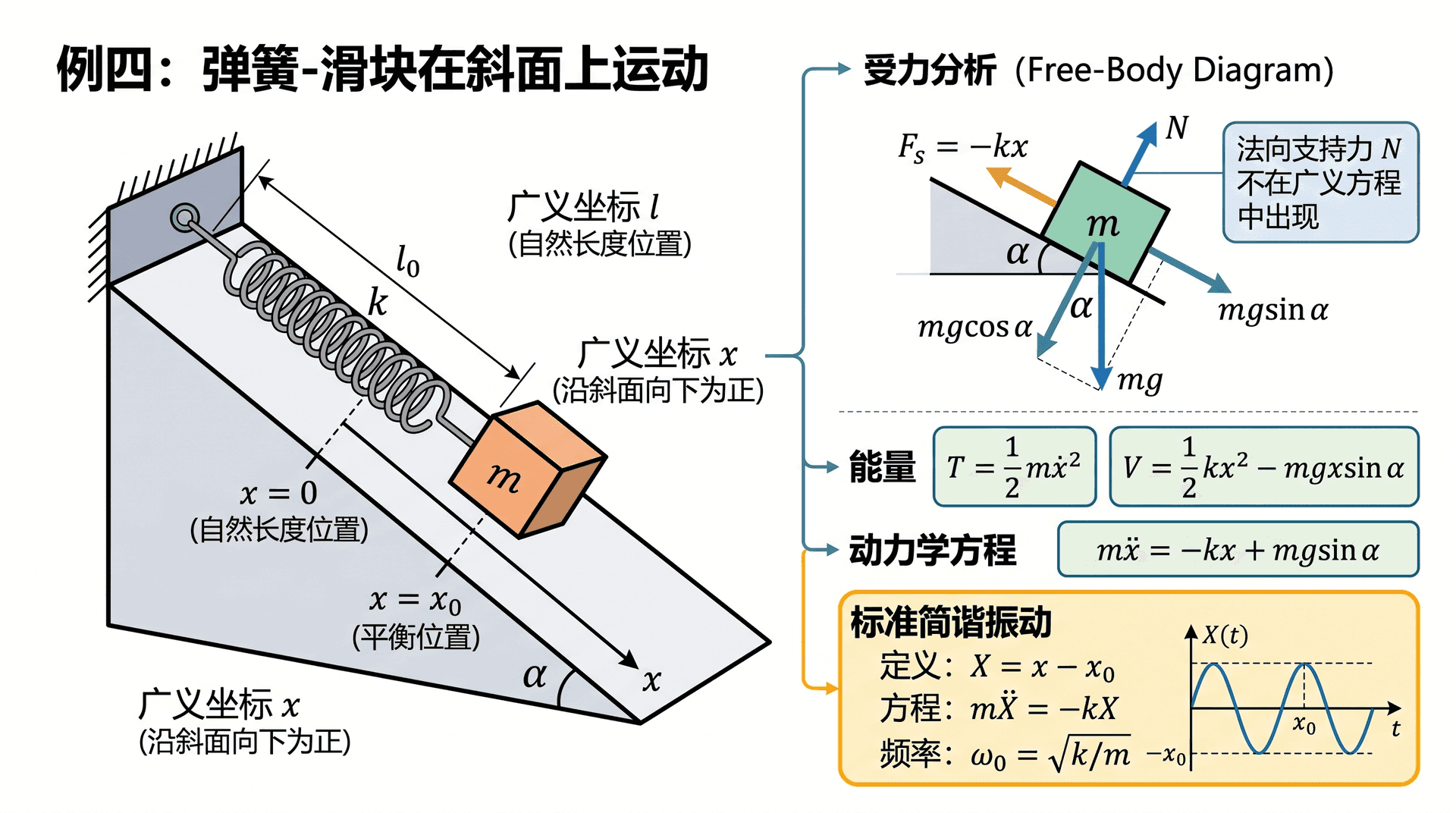
质量为 m m m α \alpha α k k k l 0 l_0 l 0 x x x
动能:T = 1 2 m x ˙ 2 T = \dfrac{1}{2}m\dot{x}^2 T = 2 1 m x ˙ 2
势能包括弹性势能和重力势能:
V = 1 2 k x 2 − m g x sin α V = \frac{1}{2}kx^2 - mgx\sin\alpha V = 2 1 k x 2 − m gx sin α 拉格朗日函数:
L = 1 2 m x ˙ 2 − 1 2 k x 2 + m g x sin α L = \frac{1}{2}m\dot{x}^2 - \frac{1}{2}kx^2 + mgx\sin\alpha L = 2 1 m x ˙ 2 − 2 1 k x 2 + m gx sin α 代入拉格朗日方程:
m x ¨ = − k x + m g sin α m\ddot{x} = -kx + mg\sin\alpha m x ¨ = − k x + m g sin α 令 x 0 = m g sin α / k x_0 = mg\sin\alpha/k x 0 = m g sin α / k X = x − x 0 X = x - x_0 X = x − x 0
m X ¨ = − k X , ω 0 = k m m\ddot{X} = -kX, \quad \omega_0 = \sqrt{\frac{k}{m}} m X ¨ = − k X , ω 0 = m k 斜面的约束力(法向力)完全没有出现,方程自然给出了绕平衡位置的简谐振动。
守恒定理与循环坐标
拉格朗日方程将守恒定律与坐标的对称性紧密联系起来,这是分析力学最优美的特征之一。
循环坐标(可遗忘坐标) :若拉格朗日函数对某个广义坐标 q j q_j q j ∂ L / ∂ q j = 0 \partial L/\partial q_j = 0 ∂ L / ∂ q j = 0 q j q_j q j
d d t ∂ L ∂ q ˙ j = 0 ⟹ p j ≡ ∂ L ∂ q ˙ j = 常数 \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_j} = 0 \implies p_j \equiv \frac{\partial L}{\partial \dot{q}_j} = \text{常数} d t d ∂ q ˙ j ∂ L = 0 ⟹ p j ≡ ∂ q ˙ j ∂ L = 常数 对应的广义动量 p j p_j p j
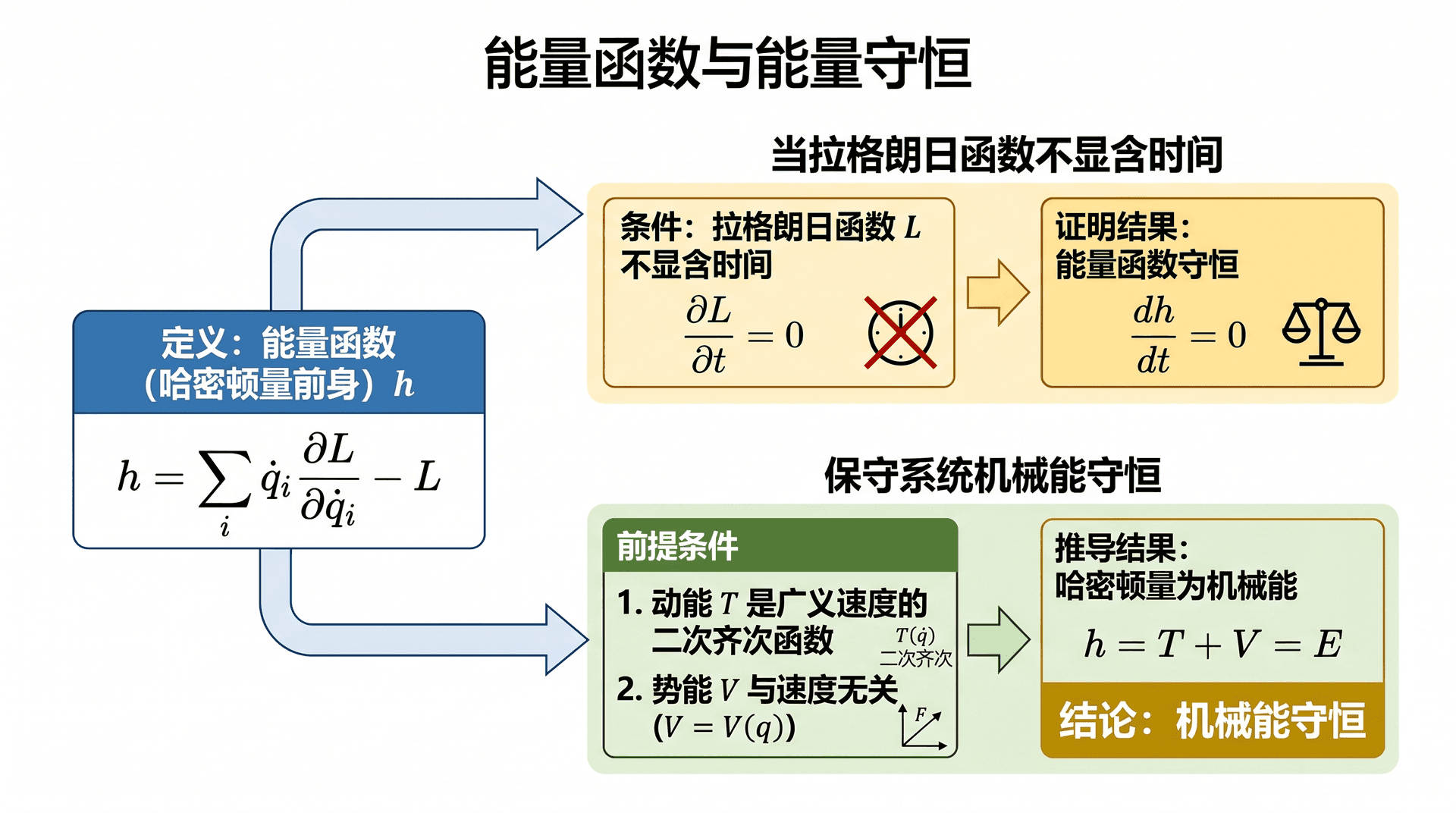
能量函数与能量守恒 :定义能量函数(哈密顿量的前身)为:
h = ∑ i q ˙ i ∂ L ∂ q ˙ i − L h = \sum_i \dot{q}_i \frac{\partial L}{\partial \dot{q}_i} - L h = i ∑ q ˙ i ∂ q ˙ i ∂ L − L 当拉格朗日函数不显含时间(∂ L / ∂ t = 0 \partial L/\partial t = 0 ∂ L / ∂ t = 0 d h / d t = 0 dh/dt = 0 d h / d t = 0 h h h h = T + V = E h = T + V = E h = T + V = E
质量为 m m m ( r , ϕ ) (r, \phi) ( r , ϕ )
T = 1 2 m ( r ˙ 2 + r 2 ϕ ˙ 2 ) , V = 0 T = \frac{1}{2}m(\dot{r}^2 + r^2\dot{\phi}^2), \quad V = 0 T = 2 1 m ( r ˙ 2 + r 2 ϕ ˙ 2 ) , V = 0 L = 1 2 m ( r ˙ 2 + r 2 ϕ ˙ 2 ) L = \frac{1}{2}m(\dot{r}^2 + r^2\dot{\phi}^2) L = 2 1 m ( r ˙ 2 + r 2 ϕ ˙ 2 ) 观察到 L L L ϕ \phi ϕ ϕ \phi ϕ
p ϕ = ∂ L ∂ ϕ ˙ = m r 2 ϕ ˙ = 常数 p_\phi = \frac{\partial L}{\partial \dot{\phi}} = mr^2\dot{\phi} = \text{常数} p ϕ = ∂ ϕ ˙ ∂ L = m r 2 ϕ ˙ = 常数 这正是粒子对原点的角动量 L z L_z L z
拉格朗日方程的典型应用
二维各向同性谐振子
质量为 m m m k k k ( x , y ) (x, y) ( x , y )
T = 1 2 m ( x ˙ 2 + y ˙ 2 ) , V = 1 2 k ( x 2 + y 2 ) T = \frac{1}{2}m(\dot{x}^2 + \dot{y}^2), \quad V = \frac{1}{2}k(x^2 + y^2) T = 2 1 m ( x ˙ 2 + y ˙ 2 ) , V = 2 1 k ( x 2 + y 2 ) L = 1 2 m ( x ˙ 2 + y ˙ 2 ) − 1 2 k ( x 2 + y 2 ) L = \frac{1}{2}m(\dot{x}^2 + \dot{y}^2) - \frac{1}{2}k(x^2 + y^2) L = 2 1 m ( x ˙ 2 + y ˙ 2 ) − 2 1 k ( x 2 + y 2 ) 对 x x x y y y
m x ¨ + k x = 0 , m y ¨ + k y = 0 m\ddot{x} + kx = 0, \quad m\ddot{y} + ky = 0 m x ¨ + k x = 0 , m y ¨ + k y = 0 两个方向的振动相互独立,固有角频率均为 ω 0 = k / m \omega_0 = \sqrt{k/m} ω 0 = k / m
x ( t ) = A 1 cos ( ω 0 t + φ 1 ) , y ( t ) = A 2 cos ( ω 0 t + φ 2 ) x(t) = A_1\cos(\omega_0 t + \varphi_1), \quad y(t) = A_2\cos(\omega_0 t + \varphi_2) x ( t ) = A 1 cos ( ω 0 t + φ 1 ) , y ( t ) = A 2 cos ( ω 0 t + φ 2 ) 当相位差 φ 1 − φ 2 = 0 \varphi_1 - \varphi_2 = 0 φ 1 − φ 2 = 0 π \pi π φ 1 − φ 2 = ± π / 2 \varphi_1 - \varphi_2 = \pm\pi/2 φ 1 − φ 2 = ± π /2 A 1 = A 2 A_1 = A_2 A 1 = A 2
平面双摆
平面双摆由两段摆组成:第一段摆长 l 1 l_1 l 1 m 1 m_1 m 1 l 2 l_2 l 2 m 2 m_2 m 2 θ 1 \theta_1 θ 1 θ 2 \theta_2 θ 2
第一个质点的坐标:
x 1 = l 1 sin θ 1 , y 1 = − l 1 cos θ 1 x_1 = l_1\sin\theta_1, \quad y_1 = -l_1\cos\theta_1 x 1 = l 1 sin θ 1 , y 1 = − l 1 cos θ 1 第二个质点的坐标(注意坐标叠加):
x 2 = l 1 sin θ 1 + l 2 sin θ 2 , y 2 = − l 1 cos θ 1 − l 2 cos θ 2 x_2 = l_1\sin\theta_1 + l_2\sin\theta_2, \quad y_2 = -l_1\cos\theta_1 - l_2\cos\theta_2 x 2 = l 1 sin θ 1 + l 2 sin θ 2 , y 2 = − l 1 cos θ 1 − l 2 cos θ 2 动能为:
T = 1 2 m 1 l 1 2 θ ˙ 1 2 + 1 2 m 2 [ l 1 2 θ ˙ 1 2 + l 2 2 θ ˙ 2 2 + 2 l 1 l 2 θ ˙ 1 θ ˙ 2 cos ( θ 1 − θ 2 ) ] T = \frac{1}{2}m_1 l_1^2\dot{\theta}_1^2 + \frac{1}{2}m_2\left[l_1^2\dot{\theta}_1^2 + l_2^2\dot{\theta}_2^2 + 2l_1 l_2\dot{\theta}_1\dot{\theta}_2\cos(\theta_1 - \theta_2)\right] T = 2 1 m 1 l 1 2 θ ˙ 1 2 + 2 1 m 2 [ l 1 2 θ ˙ 1 2 + l 2 2 θ ˙ 2 2 + 2 l 1 l 2 θ ˙ 1 θ ˙ 2 cos ( θ 1 − θ 2 ) ] 势能为:
V = − ( m 1 + m 2 ) g l 1 cos θ 1 − m 2 g l 2 cos θ 2 V = -(m_1 + m_2)gl_1\cos\theta_1 - m_2 gl_2\cos\theta_2 V = − ( m 1 + m 2 ) g l 1 cos θ 1 − m 2 g l 2 cos θ 2 对 θ 1 \theta_1 θ 1 θ 2 \theta_2 θ 2
双摆在小角度下可以近似为两个耦合的简谐振子,方程变为线性,可以用矩阵方法求解简正模式(将在振动理论部分详细讨论)。一旦角度较大,运动将变得极度敏感于初始条件,微小的初始差异会导致运动轨迹的巨大偏离。
两个质量均为 m m m k k k k ′ k' k ′ x 1 x_1 x 1 x 2 x_2 x 2
T = 1 2 m x ˙ 1 2 + 1 2 m x ˙ 2 2 T = \frac{1}{2}m\dot{x}_1^2 + \frac{1}{2}m\dot{x}_2^2 T = 2 1 m x ˙ 1 2 + 2 1 m x ˙ 2 2 V = 1 2 k x 1 2 + 1 2 k x 2 2 + 1 2 k ′ ( x 2 − x 1 ) 2 V = \frac{1}{2}kx_1^2 + \frac{1}{2}kx_2^2 + \frac{1}{2}k'(x_2 - x_1)^2 V = 2 1 k x 1 2 + 2 1 k x 2 2 + 2 1 k ′ ( x 2 − x 1 ) 2 分别对 x 1 x_1 x 1 x 2 x_2 x 2
m x ¨ 1 = − k x 1 + k ′ ( x 2 − x 1 ) m\ddot{x}_1 = -kx_1 + k'(x_2 - x_1) m x ¨ 1 = − k x 1 + k ′ ( x 2 − x 1 ) m x ¨ 2 = − k x 2 − k ′ ( x 2 − x 1 ) m\ddot{x}_2 = -kx_2 - k'(x_2 - x_1) m x ¨ 2 = − k x 2 − k ′ ( x 2 − x 1 ) 引入简正坐标 q + = x 1 + x 2 q_+ = x_1 + x_2 q + = x 1 + x 2 q − = x 1 − x 2 q_- = x_1 - x_2 q − = x 1 − x 2
m q ¨ + = − k q + , ω + = k m m\ddot{q}_+ = -kq_+, \quad \omega_+ = \sqrt{\frac{k}{m}} m q ¨ + = − k q + , ω + = m k m q ¨ − = − ( k + 2 k ′ ) q − , ω − = k + 2 k ′ m m\ddot{q}_- = -(k + 2k')q_-, \quad \omega_- = \sqrt{\frac{k + 2k'}{m}} m q ¨ − = − ( k + 2 k ′ ) q − , ω − = m k + 2 k ′ 同相模式中两滑块同步运动,中间弹簧不伸缩,频率较低;反相模式中两滑块反向运动,中间弹簧压缩/拉伸最大,频率较高。
练习题
1. 一个质点在平面内运动,用极坐标 ( r , ϕ ) (r, \phi) ( r , ϕ ) L = 1 2 m ( r ˙ 2 + r 2 ϕ ˙ 2 ) − V ( r ) L = \dfrac{1}{2}m(\dot{r}^2 + r^2\dot{\phi}^2) - V(r) L = 2 1 m ( r ˙ 2 + r 2 ϕ ˙ 2 ) − V ( r )
A. r r r
B. ϕ \phi ϕ p ϕ = m r 2 ϕ ˙ p_\phi = mr^2\dot{\phi} p ϕ = m r 2 ϕ ˙
C. 两个广义动量都守恒
D. 两个广义动量都不守恒
答案:B
分析:循环坐标的判断依据是 ∂ L / ∂ q j = 0 \partial L/\partial q_j = 0 ∂ L / ∂ q j = 0 ∂ L / ∂ ϕ \partial L/\partial \phi ∂ L / ∂ ϕ L L L ϕ \phi ϕ ϕ ˙ \dot{\phi} ϕ ˙ ∂ L / ∂ ϕ = 0 \partial L/\partial \phi = 0 ∂ L / ∂ ϕ = 0 ϕ \phi ϕ p ϕ = ∂ L / ∂ ϕ ˙ = m r 2 ϕ ˙ p_\phi = \partial L/\partial \dot{\phi} = mr^2\dot{\phi} p ϕ = ∂ L / ∂ ϕ ˙ = m r 2 ϕ ˙ ∂ L / ∂ r = m r ϕ ˙ 2 − d V / d r ≠ 0 \partial L/\partial r = mr\dot{\phi}^2 - dV/dr \neq 0 ∂ L / ∂ r = m r ϕ ˙ 2 − d V / d r = 0 r r r r ˙ \dot{r} r ˙
A. 广义坐标必须是直角坐标系中的位置分量
B. 广义坐标的数目等于系统中质点的总数
C. 广义坐标的数目等于系统的自由度数,可以是角度、弧长等任意形式
D. 广义速度的量纲必须是 m / s \mathrm{m/s} m/s
答案:C
分析:广义坐标的选取是灵活的,只要能够完整描述系统的构型即可,不必是直角坐标,可以是角度、弧长、面积等,因此 A、D 错误。广义坐标的数目等于系统的自由度 s = 3 N − k s = 3N - k s = 3 N − k N N N s < 3 N s < 3N s < 3 N θ \theta θ θ ˙ \dot{\theta} θ ˙ r a d / s \mathrm{rad/s} rad/s m / s \mathrm{m/s} m/s
3. 哈密顿原理(最小作用量原理)中,作用量 S = ∫ t 1 t 2 L d t S = \int_{t_1}^{t_2} L\,dt S = ∫ t 1 t 2 L d t
A. 真实运动路径使作用量为零
B. 在满足边界条件的所有路径中,真实路径使作用量的一阶变分为零
C. 真实运动路径总是使作用量取极大值
D. 只有保守系统才能用哈密顿原理描述
答案:B
分析:哈密顿原理要求 δ S = 0 \delta S = 0 δ S = 0 t 1 t_1 t 1 t 2 t_2 t 2
4. 对于不显含时间的拉格朗日函数(∂ L / ∂ t = 0 \partial L / \partial t = 0 ∂ L / ∂ t = 0 h = ∑ i q ˙ i ∂ L ∂ q ˙ i − L h = \sum_i \dot{q}_i \dfrac{\partial L}{\partial \dot{q}_i} - L h = ∑ i q ˙ i ∂ q ˙ i ∂ L − L
A. h h h T T T
B. h h h
C. h h h h = T + V h = T + V h = T + V
D. h h h h h h
答案:C
分析:当 ∂ L / ∂ t = 0 \partial L/\partial t = 0 ∂ L / ∂ t = 0 h h h d h / d t = 0 dh/dt = 0 d h / d t = 0 h h h h h h T T T ∑ i q ˙ i ∂ T / ∂ q ˙ i = 2 T \sum_i \dot{q}_i \partial T/\partial \dot{q}_i = 2T ∑ i q ˙ i ∂ T / ∂ q ˙ i = 2 T V V V ∑ i q ˙ i ∂ L / ∂ q ˙ i = 2 T \sum_i \dot{q}_i \partial L/\partial \dot{q}_i = 2T ∑ i q ˙ i ∂ L / ∂ q ˙ i = 2 T h = 2 T − ( T − V ) = T + V = E h = 2T - (T - V) = T + V = E h = 2 T − ( T − V ) = T + V = E h h h T T T
5. 质量为 m = 1 k g m = 1\,\mathrm{kg} m = 1 kg l = 1 m l = 1\,\mathrm{m} l = 1 m ω 0 \omega_0 ω 0 T T T g = 10 m / s 2 g = 10\,\mathrm{m/s^2} g = 10 m/ s 2
解:
取悬挂点为势能零点,摆角 θ \theta θ
动能:T = 1 2 m l 2 θ ˙ 2 T = \dfrac{1}{2}ml^2\dot{\theta}^2 T = 2 1 m l 2 θ ˙ 2
势能:V = − m g l cos θ V = -mgl\cos\theta V = − m g l cos θ
拉格朗日函数:
L = T − V = 1 2 m l 2 θ ˙ 2 + m g l cos θ L = T - V = \frac{1}{2}ml^2\dot{\theta}^2 + mgl\cos\theta L = T − V = 2 1 m l 2 θ ˙ 2 + m g l cos θ 计算偏导数:
∂ L ∂ θ ˙ = m l 2 θ ˙ , d d t ∂ L ∂ θ ˙ = m l 2 θ ¨ \frac{\partial L}{\partial \dot{\theta}} = ml^2\dot{\theta}, \quad \frac{d}{dt}\frac{\partial L}{\partial \dot{\theta}} = ml^2\ddot{\theta} ∂ θ ˙ ∂ L = m l 2 θ ˙ , d t d ∂ θ ˙ ∂ L = m l 2 θ ¨ ∂ L ∂ θ = − m g l sin θ \frac{\partial L}{\partial \theta} = -mgl\sin\theta ∂ θ ∂ L = − m g l sin θ 代入拉格朗日方程 d d t ∂ L ∂ θ ˙ − ∂ L ∂ θ = 0 \dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{\theta}} - \dfrac{\partial L}{\partial \theta} = 0 d t d ∂ θ ˙ ∂ L − ∂ θ ∂ L = 0
m l 2 θ ¨ + m g l sin θ = 0 ⟹ θ ¨ + g l sin θ = 0 ml^2\ddot{\theta} + mgl\sin\theta = 0 \implies \ddot{\theta} + \frac{g}{l}\sin\theta = 0 m l 2 θ ¨ + m g l sin θ = 0 ⟹ θ ¨ + l g sin θ = 0 小角度近似 sin θ ≈ θ \sin\theta \approx \theta sin θ ≈ θ θ \theta θ
θ ¨ + g l θ = 0 \ddot{\theta} + \frac{g}{l}\theta = 0 θ ¨ + l g θ = 0 固有角频率:
ω 0 = g l = 10 1 = 10 ≈ 3.16 r a d / s \omega_0 = \sqrt{\frac{g}{l}} = \sqrt{\frac{10}{1}} = \sqrt{10} \approx 3.16\,\mathrm{rad/s} ω 0 = l g = 1 10 = 10 ≈ 3.16 rad/s 周期:
T = 2 π ω 0 = 2 π 10 ≈ 6.28 3.16 ≈ 1.99 s T = \frac{2\pi}{\omega_0} = \frac{2\pi}{\sqrt{10}} \approx \frac{6.28}{3.16} \approx 1.99\,\mathrm{s} T = ω 0 2 π = 10 2 π ≈ 3.16 6.28 ≈ 1.99 s
6. 两个质量均为 m = 0.5 k g m = 0.5\,\mathrm{kg} m = 0.5 kg k = 8 N / m k = 8\,\mathrm{N/m} k = 8 N/m k ′ = 4 N / m k' = 4\,\mathrm{N/m} k ′ = 4 N/m ω + \omega_+ ω + ω − \omega_- ω −
解:
设两滑块偏离平衡位置的位移分别为 x 1 x_1 x 1 x 2 x_2 x 2
动能:
T = 1 2 m x ˙ 1 2 + 1 2 m x ˙ 2 2 T = \frac{1}{2}m\dot{x}_1^2 + \frac{1}{2}m\dot{x}_2^2 T = 2 1 m x ˙ 1 2 + 2 1 m x ˙ 2 2 势能:
V = 1 2 k x 1 2 + 1 2 k x 2 2 + 1 2 k ′ ( x 2 − x 1 ) 2 V = \frac{1}{2}kx_1^2 + \frac{1}{2}kx_2^2 + \frac{1}{2}k'(x_2 - x_1)^2 V = 2 1 k x 1 2 + 2 1 k x 2 2 + 2 1 k ′ ( x 2 − x 1 ) 2 对 x 1 x_1 x 1
m x ¨ 1 = − k x 1 + k ′ ( x 2 − x 1 ) = − ( k + k ′ ) x 1 + k ′ x 2 m\ddot{x}_1 = -kx_1 + k'(x_2 - x_1) = -(k + k')x_1 + k'x_2 m x ¨ 1 = − k x 1 + k ′ ( x 2 − x 1 ) = − ( k + k ′ ) x 1 + k ′ x 2 对 x 2 x_2 x 2
m x ¨ 2 = − k x 2 − k ′ ( x 2 − x 1 ) = k ′ x 1 − ( k + k ′ ) x 2 m\ddot{x}_2 = -kx_2 - k'(x_2 - x_1) = k'x_1 - (k + k')x_2 m x ¨ 2 = − k x 2 − k ′ ( x 2 − x 1 ) = k ′ x 1 − ( k + k ′ ) x 2 引入简正坐标 q + = x 1 + x 2 q_+ = x_1 + x_2 q + = x 1 + x 2 q − = x 1 − x 2 q_- = x_1 - x_2 q − = x 1 − x 2
m q ¨ + = − k q + m\ddot{q}_+ = -kq_+ m q ¨ + = − k q + 两式相减:
m q ¨ − = − ( k + 2 k ′ ) q − m\ddot{q}_- = -(k + 2k')q_- m q ¨ − = − ( k + 2 k ′ ) q − 同相模式(q + q_+ q +
ω + = k m = 8 0.5 = 16 = 4 r a d / s \omega_+ = \sqrt{\frac{k}{m}} = \sqrt{\frac{8}{0.5}} = \sqrt{16} = 4\,\mathrm{rad/s} ω + = m k = 0.5 8 = 16 = 4 rad/s 反相模式(q − q_- q −
ω − = k + 2 k ′ m = 8 + 2 × 4 0.5 = 16 0.5 = 32 = 4 2 ≈ 5.66 r a d / s \omega_- = \sqrt{\frac{k + 2k'}{m}} = \sqrt{\frac{8 + 2\times4}{0.5}} = \sqrt{\frac{16}{0.5}} = \sqrt{32} = 4\sqrt{2} \approx 5.66\,\mathrm{rad/s} ω − = m k + 2 k ′ = 0.5 8 + 2 × 4 = 0.5 16 = 32 = 4 2 ≈ 5.66 rad/s 同相模式频率较低(中间弹簧不参与振动),反相模式频率较高(中间弹簧参与压缩/拉伸)。